




星标“医工学人”,第一时间获取医工交叉领域新闻动态~

“1982年,Herr在新罕布什尔州华盛顿山攀冰时遭遇暴风雪,双腿被截肢。他说,将来会考虑将接口设备用于重建他的下肢。”
7月1日,Nature Medicine发表研究文章Continuous neural control of a bionic limb restores biomimetic gait after amputation,
研究发现,可以完全由大脑和脊髓控制的机器人腿使七名失去小腿的人能够比使用标准机器人腿的参与者快 41%。他们也有更好的平衡和改变速度、爬楼梯和跨过障碍物的能力。
“这是第一项证明具有完全神经调节的自然步态模式的研究,其中人的大脑100%控制仿生假肢,而不是机器人算法,”该研究的共同作者,剑桥麻省理工学院的生物物理学家Hugh Herr在宣布研究结果的新闻发布会上说。
背景
科幻小说描绘了神经控制的仿生腿,具有与完整的生物肢体相同的多功能性和响应性。不幸的是,目前的技术状况远没有那么特殊。
目前的仿生腿通常使用有限状态机和模式识别方法,根据步态和地形类型的阶段将循环腿运动建模为离散状态。通过使用机器人传感器检测当前状态,控制器可以重放预定义的内在步态算法,而无需用户进行连续神经调控。虽然先进的模型帮助截肢者更流畅地行走、跑步和爬楼梯,但是机器人而不是用户保留了对腿部运动的控制,并且设备感觉不像是身体的一部分。
完全由人类神经系统驱动的神经假肢,不依赖于内在步态控制器,可以释放接近完整肢体的仿生能力。实现此类功能需要高带宽神经调控来满足步态需求,包括适应足部定位、减震和跨不同地形的推进。
鉴于腿部神经力学的复杂性,当前系统的局限性并不令人惊讶。人类步态涉及传入和传出信号之间的协调相互作用,这些信号属于脊髓的神经回路。更糟糕的是,在标准护理截肢手术过程中,大量远端组织被丢弃,导致基本运动外周传入神经丧失。
为了弥补外周传入神经的缺失,已经提出了电神经刺激技术,并主要在上肢神经假体中进行了研究。临床研究中,被动和内在主动控制的仿生腿被设计为使用电神经刺激提供传入反馈,已被证明可以改善步态功能。然而,当完全由人类神经系统驱动时,这些系统尚未表现出仿生步态。
综上,在这项研究中,研究者通过在截肢残肢端内部增强肌肉传入将增强神经假肢的仿生步态适应性,包括实现连续步态神经调控。
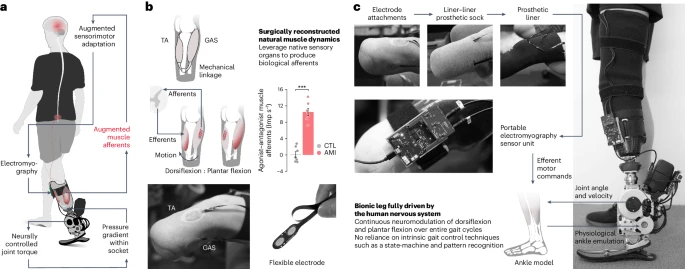
图1 神经假体 a,显示神经假体界面和完全由人类神经系统驱动的仿生腿的示意图。增强残余肌肉传入增强了运动步态控制和适应的主要反馈方式。通过对仿生腿的持续神经控制,个体可以有效地微调他们的残余运动控制,以实现仿生仿生步态。在地面接触期间,机械信息通过假体窝内的压力梯度传递到神经系统,从而机械刺激残留组织。这种额外的传入信号装置可以为感觉运动适应提供知觉体验。b,神经假体接口由AMI和皮肤贴合的EMG柔性电极组成。与非 AMI CTL 队列相比,AMI 被证明可以增强激动剂-拮抗剂传入信号转导(条形图,平均值;误差线图,s.e.m.;n = 7 每组,双侧非配对 t 检验,***P = 7.7 × 10−7).请注意,当作为激动剂工作时,七个 CTL 肌肉传入物中有四个增加(非仿生),导致激动剂-拮抗剂肌传入物的负值。c,显示了自主神经假体的组件。来自 TA 和 GAS 的 EMG 信号用于在步态的每个阶段持续控制仿生踝关节。为了为 EMG 控制器创建上限扭矩,使用每个脚踝位置和速度下的最大肌肉力-长度和力-速度特征的文献值定义每个测量关节状态的最大假体关节扭矩43,44.此外,测量的关节状态用于估计韧带和关节囊等被动生物结构的扭矩贡献。在这里,没有使用内在的步态控制技术来驱动仿生腿,例如状态机和模式识别算法。
方法
改良致动-拮抗肌神经界面(AMI)来增强残余的肌肉传入
该研究的临床试验包括 14 名膝盖以下截肢的参与者。在佩戴机器人设备之前,其中七人接受了手术,将腿部残余部分的肌肉连接在一起。AMI 手术通过手术将残留致动肌和拮抗肌连接起来,以在截肢残肢内重建致动肌-拮抗剂肌肉动力学。通过恢复自然的肌肉动态,AMI旨在重现自然的肌肉运动,使一块肌肉的收缩的同时伸展另一块肌肉。它有助于减轻疼痛、保持肌肉质量并提高仿生肢体的舒适度。
仿生腿本身包括一个嵌入传感器的假肢脚踝,以及连接到皮肤表面的电极。这些捕获截肢部位肌肉产生的电信号,并将它们发送到小型计算机进行解码。该仿生腿重 2.75 公斤,与自然下肢的平均重量相近。
该研究评估了增加残余肌肉传入对膝下截肢人类仿生步态神经调控的影响。并作出假设,即使残余肌肉传入的少量增加也将促进对仿生步态力学、适应性和扰动反应的神经控制,所有这些都不依赖于内在的步态控制器。
结果
参与者使用他们的新仿生腿练习了总共六个小时。然后,研究人员将他们在各种任务中的表现与其他七名接受过常规手术和假肢的参与者进行了比较。
AMI将肌肉信号的速率提高到平均每秒10.5次冲动,而对照组约为每秒0.7次冲动。虽然这仅相当于生物完整肌肉中肌肉信号的18%(大约每秒60次冲动),但AMI的参与者能够完全控制他们的假肢,并且比对照组的参与者快41%。他们的峰值速度与没有截肢的人在10米长的走廊上平坦行走时的速度相匹配。
研究人员还测试了参与者驾驭各种情况的能力,包括在5度坡度的表面上行走,爬楼梯和跨过障碍物。在所有场景中,AMI 用户都表现出比对照组更好的平衡性和更快的性能。
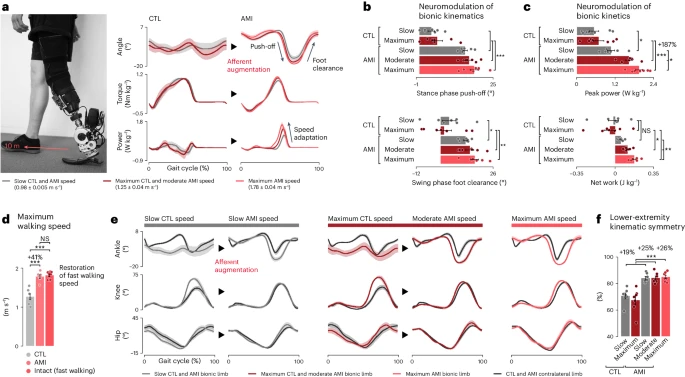
图2 神经假体恢复仿生行走 a,在10 m开放走廊中水平地面行走的仿生踝关节力学以三种步行速度显示(n = 7/队列;粗线,平均值;阴影区域,s.e.m.)。还报告了每个目标速度的研究人群步行速度(平均± s.e.m.)。b,c,图报告了每种步行速度的神经调节仿生运动学(b)和动力学(c)(条,平均值;误差条,s.e.m.)。d,显示了每个队列的最大步行速度,并与文献中报道的具有相似体重的生物完整个体的快速步行速度进行了比较50(柱线,平均值;误差线,S.E.M.)。e,图示了三种目标步行速度下的下肢关节轨迹(粗线,平均值;阴影区域,s.e.m.)。f,图报告每个目标速度的LEK对称性(条形图,平均值;误差线图,s.e.m.)。
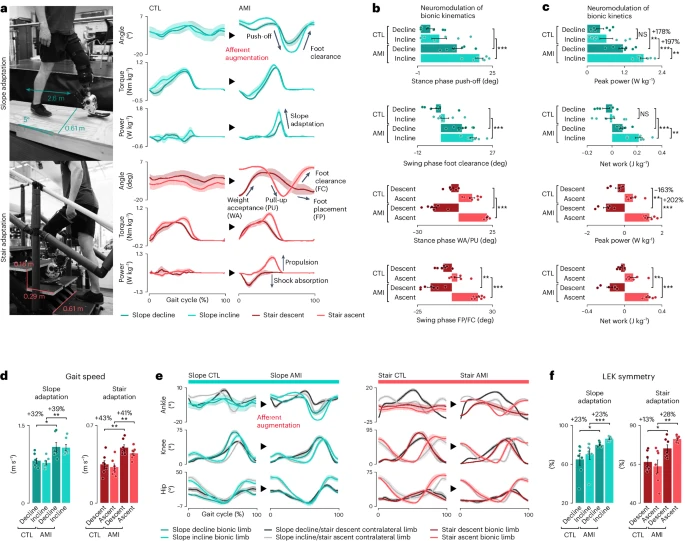
图3 神经假体恢复仿生地形适应 a,显示了 5° 斜坡和楼梯上的仿生脚踝地形适应(n = 7 每个队列;粗线,平均值;阴影区域,s.e.m.)。b,c,图报告了每种地形适应类型的神经调节仿生运动学(b)和动力学(c)(条形图,平均值;误差线图,S.E.M.)。楼梯下降时报告的峰值功率值为负,而所有其他情况的峰值功率值为正。重量接受和引体向上期间的净工作分别报告为楼梯下降和上升。d,绘图报告每种地形适应类型的步态速度(条形图,平均值;误差线,s.e.m.)。e,图示了每种地形适应的下肢关节轨迹(粗线,平均值;阴影区域,s.e.m.)。f,图报告每个地形适应的LEK对称性(条形图,平均值;误差线图,s.e.m.)。
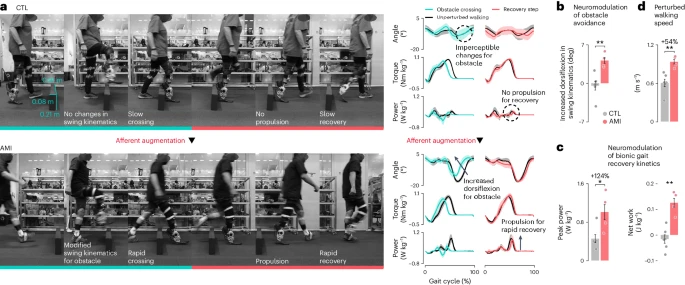
图4 仿生扰动响应 a,显示了穿越障碍物的计时摄影和仿生踝关节力学,包括随后的恢复步骤(n = 6 CTL 和 n = 4 AMI;粗线,平均值;阴影区域,s.e.m.)。请注意,与步态恢复期间不受干扰的行走和推进动力学相比,AMI 队列在穿越障碍物期间摆动运动学的背屈角度增加。b,绘制了用于穿越障碍物的改进仿生摆动运动学与其无障碍行走值(条形图,平均值;误差线,s.e.m.)的比较图。c,图报告在随后的恢复步骤中神经调节的仿生动力学(条形图,平均值;误差线图,s.e.m.)。d,显示了 CTL 和 AMI 队列的扰动步行速度(条形图,平均值;误差线图,s.e.m.)
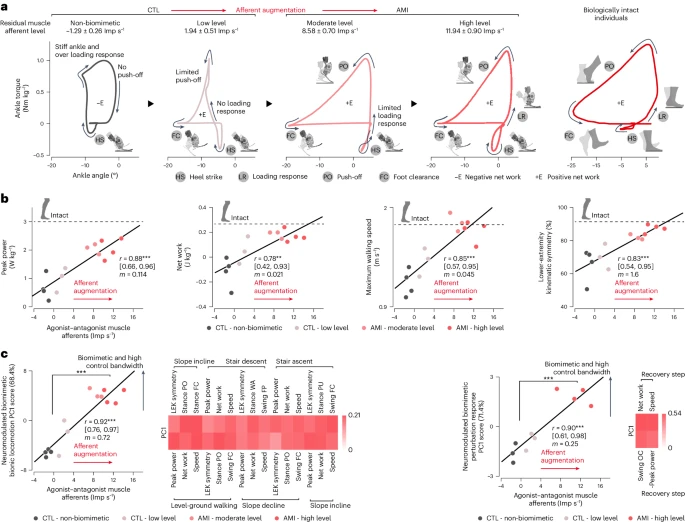
图5 增强肌肉传入在神经调控下实现仿生步态 a,显示 CTL 和 AMI 队列的图在最大步行速度下具有不同水平的残余肌肉传入:非仿生 (n = 4 CTL)、低水平 (n = 3 CTL)、中等水平 (n = 3 AMI) 和高水平 (n = 4 AMI)。报告了每组相应的激动剂-拮抗剂肌传入(平均± s.e.m.)。为了进行比较,右图显示了生物学上完整的踝关节扭矩-角度轨迹11.注意神经调节的仿生步态如何随着残余肌肉传入的增加而向自然行走演变。b,受试者在最大速度下的神经调节仿生功能指标与他们的激动剂-拮抗肌传入细胞作图。报告了皮尔逊相关性 (r)、95% CI 和斜率 (m) (n = 14, **P = 0.0011, ***P < 2.3 × 10−4).为了进行比较,来自生物完整种群的每个生物力学指标的值用虚线表示49,50,52.其他步态条件的扭矩-角轨迹和相关图显示在扩展数据图中。第6-8段。c,应用于所有测试步态条件的仿生指标的 PCA 用于评估总仿生功能。为了获得一致的仿生特征的正征,反转了楼梯下降的负峰值功率和净功征象。PC1 评分与受试者的激动剂-拮抗肌传入肌作图。报告了 Pearson 相关性 (r)、95% CI 和斜率 (m)(未受干扰的步态条件的 n = 14,受干扰的行走的 n = 10)。
结论与展望
该技术为想要重新获得自然步行体验的截肢者提供了新的希望。“截肢的人希望能够控制自己的四肢。他们希望肢体成为他们身体的一部分。”生物医学工程师Tommaso Lenzi说。创造这种神经接口是必要的。
Lenzi说,腿部设计的改进可能包括使其更轻和升级表面电极,这些电极对湿度和汗水敏感,可能不适合日常使用。未来的研究将需要测试该设备是否能够处理更苛刻的活动,例如短跑和跳跃。
Herr说,他的团队已经在寻找用小型植入磁球取代表面电极的方法,这些磁球可以准确跟踪肌肉运动。
Lenzi 说,这项试验“为我们需要将其转化为临床上可行的技术和解决方案奠定了基础,供所有截肢者使用”。
▼扫码阅读英文原文
Song, H., Hsieh, TH., Yeon, S.H. et al. Continuous neural control of a bionic limb restores biomimetic gait after amputation. Nat Med (2024). https://doi.org/10.1038/s41591-024-02994-9
▼视频资料
*作者水平有限,中文编译仅供参考,一切内容以英文原文为准。如涉及版权问题,请联系我们删除。
欢迎文末留言参与讨论~
END
编辑 | 罗虎
参考 | Nature Medicine
审核 | 医工学人理事会
扫码注册加入医工学人,进入综合及细分领域群聊,参与线上线下交流活动

*声明:医工学人为公益性非盈利组织,不收取任何注册费用,申请审核通过后将以邮件通知
推荐阅读
AFM | 植入式设备电源的未来:具有生物相容性的超级电容器
点击关注医工学人



本篇文章来源于微信公众号: 医工学人
