




星标“医工学人”,第一时间获取医工交叉领域新闻动态~

步长是健康和疾病的重要诊断和预后指标。可穿戴设备可以连续估计步长(例如,在临床或现实世界中),但是,当前估计方法的准确性尚不是最佳。该研究开发了机器学习模型,根据来自472名患有不同神经系统疾病(包括帕金森病和健康对照)的年轻人和老年人佩戴的单个下背部惯性测量单元的数据来估计步长。研究了超过 80,000 步,最佳模型在单个步骤中显示出高精度(均方根误差,RMSE = 6.08 cm,ICC(2,1) = 0.89),并且在连续十个步骤中平均时具有更高的准确性(RMSE = 4.79 cm,ICC(2,1) = 0.93),成功达到了 RMSE 低于 5 cm 的预定义目标(通常被认为是最小的临床重要差异)。将机器学习与单个可穿戴传感器相结合,即使在患有神经系统疾病的患者中,也能生成准确的步长测量值。

背景
步长通常随着年龄的增长而减少。
步态关键时空参数[步速(例如,步长、步态速度)、节奏(例如,步频)和变异性(例如,步长的步进变化)]的改变,特别是步长,能够预测不良的健康结果,如跌倒、认知能力下降、痴呆、发病率、死亡率,以及对干预措施的反应。鉴于其反映衰老和疾病阶段(例如,在帕金森病中)的重要性和能力,步长也被用作结果测量。虽然可以通过肉眼观察到步长的巨大变化,但需要定量估计来准确确定步长随时间的细微变化,监测对治疗的反应,并评估疾病进展。这种定量估计可以更好地评估与衰老相关的变化,提高客观检测和跟踪疾病的能力,并增强量化干预措施影响的能力。
越来越多的文献表明,连续(例如,24/7)步态监测具有临床意义,并且它捕获了无法通过诊所或实验室的常规步行能力测试来测量的信息(例如一周内步态模式的变化)。此外,持续监测弥合了日常生活中采取的步态测量与在实验室中采取的步态测量之间的差距。后者可能反映容量,而前者则捕获实际的、现实世界的功能。因此,为了最佳地表征老年人和神经系统疾病患者的步态,长时间测量步态可能会有所帮助。基于摄像头的系统和仪表化的步态垫不能用于此目的,但惯性测量单元(IMU)有可能实现这一目标。
IMU 可以应用于临床环境,也可以用于评估长时间的真实行走。使用安装在特定位置的可穿戴设备,采集的IMU信号可以估计和分析步态参数,包括步长。但是,由于 IMU 不直接测量空间参数,因此需要估计器或模型。
方法
本工作的目标是开发一种回归模型,该模型可以使用从实验室环境中直线行走轨迹中从单个下背部可穿戴设备收集的 IMU 数据,比当前解决方案(低于 5 厘米准地估计步长。
该研究的主要贡献在于创建了一个广义模型,该模型在不同人群中进行了训练和测试,该模型可以准确估计老年人和神经系统疾病患者的步长,而无需校准或使用任何人口统计学或人体测量学特征。
事实上,在考虑步速域(即步长)时,一种常见的做法是平均步行中的多个步数,以便为该步态参数提供单一的、有代表性的摘要。这种平均方法通常用于步态的实验室和临床研究;步行测试通常持续 30 秒到 6 分钟,平均值用于描述此特征。这种平均技术可以减少可能影响用于估计步长的计算特征的噪声。因此,考虑几个步骤的平均值为估计患者的步态参数提供了单一且更可靠的表示。该研究还探讨了该方法获得的步长估计的精度与估计瞬时步长的能力之间的权衡。评估这种权衡对于诸如分步变异性等结果非常重要,这些结果可以提供额外的诊断、预后和机制信息,当步长的瞬时值可用并且可以确定步进变异性时。
结果
该研究中模型的性能与其他生物力学估计器(例如倒摆模型)进行比较时,观察到很大的改善。
该模型在估计的步长和测量的步长之间呈现出很强的线性相关性。然而,所呈现的 Bland-Altman 图显示,所开发的模型倾向于低估大步长,而高估短步长。
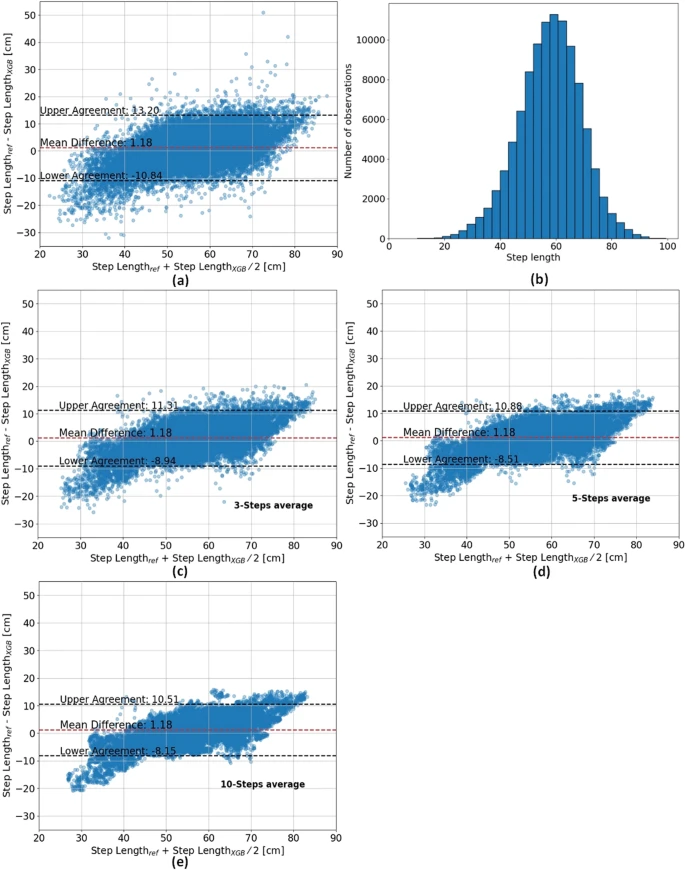
这一观察结果表明,该模型的估计存在系统性偏差,对于较长的步长估计值较小,对于较短的步长估计值,存在着一致的偏差。虽然这种局限性是许多模型的共同挑战,并且可能会对诊断环境中所需的精度造成担忧。它作为一种进展生物标志物的影响可能相对较小,通常更多地依赖于受试者内随时间的变化。基于受试者内变化的进展生物标志物仍可能捕获大多数步长的疾病进展,仅在大步中可能被高估,这在神经系统疾病患者中不太常见,而在小步中低估最小。
评价
我们正在看到人工智能时代下可穿戴技术的飞跃式发展
▼扫码阅读英文原文
Zadka, A., Rabin, N., Gazit, E. et al. A wearable sensor and machine learning estimate step length in older adults and patients with neurological disorders. npj Digit. Med. 7, 142 (2024). https://doi.org/10.1038/s41746-024-01136-2
*中文编译仅供参考,一切内容以英文原文为准。如涉及版权问题,请联系我们删除。
END
编辑 | 罗虎
来源 | npj Digital Medicine
审核 | 医工学人
关注“医工交叉前沿技术”,可进入医工学人交流群

小助手微信(申请时请备注个人信息)
推荐阅读
点击关注医工学人



本篇文章来源于微信公众号: 医工学人
