





医工简报是由医工学人理事会及学生委员会整理的医工交叉领域一日内最新进展,内容来源为著名期刊、国内外知名媒体等。周一至周五工作日发布!
医工学人已建立各细分领域微信群聊(国内外医工交叉领域顶尖高校、科研院所、医院、企业等专家学者、硕博士、工程师、企业家等),欢迎加入医工学人社群(入群方式请查看文末链接)。
行业动态
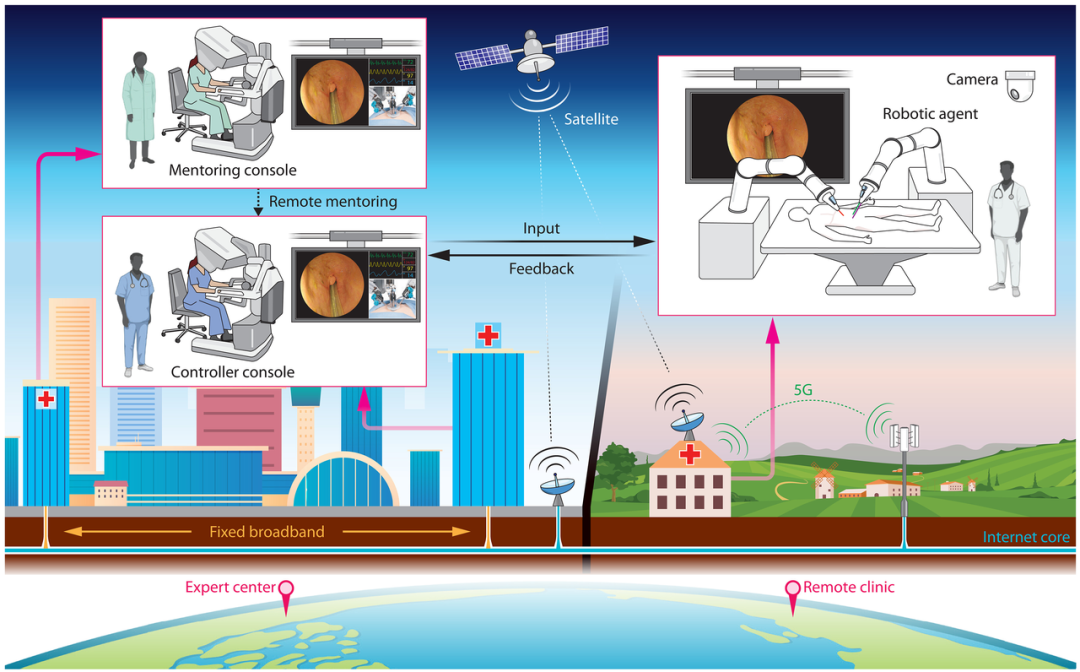
https://doi.org/10.1126/scirobotics.adq0192
临床综合

医学人工智能
Nature | 用AI助力药物发现的四种方法

https://www.nature.com/articles/d41586-025-00602-5
医学成像技术
PNAS | 基于学习的纵向图像变化推断:在胚胎发育、伤口愈合和衰老大脑中的应用

https://doi.org/10.1073/pnas.2411492122
康复(神经)工程
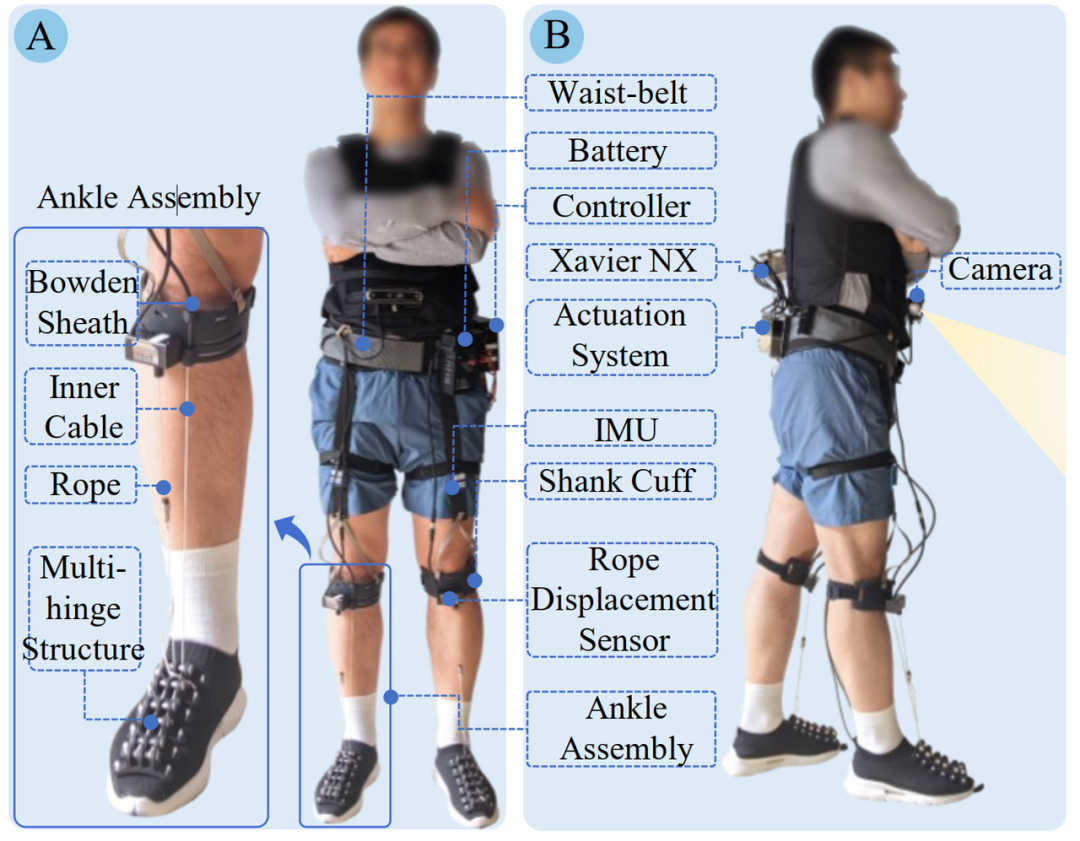
IEEE Trans. Automat. Sci. Eng. | 设计与验证一种视觉集成多铰链外装以辅助背屈:对健康个体的可行性研究
可穿戴技术
Adv. Intell. Syst. | 一种用于手工搬运任务的软性可穿戴机器人,配备可调节的扭绳执行器和两级传动机构
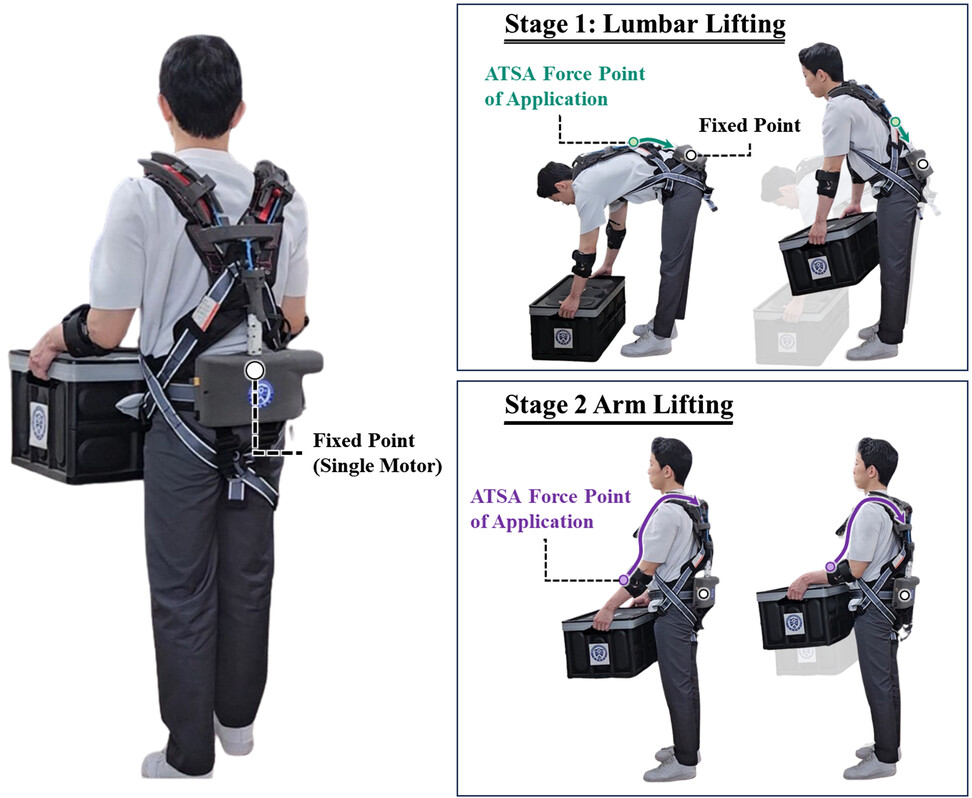
https://doi.org/10.1002/aisy.202400700
生物材料
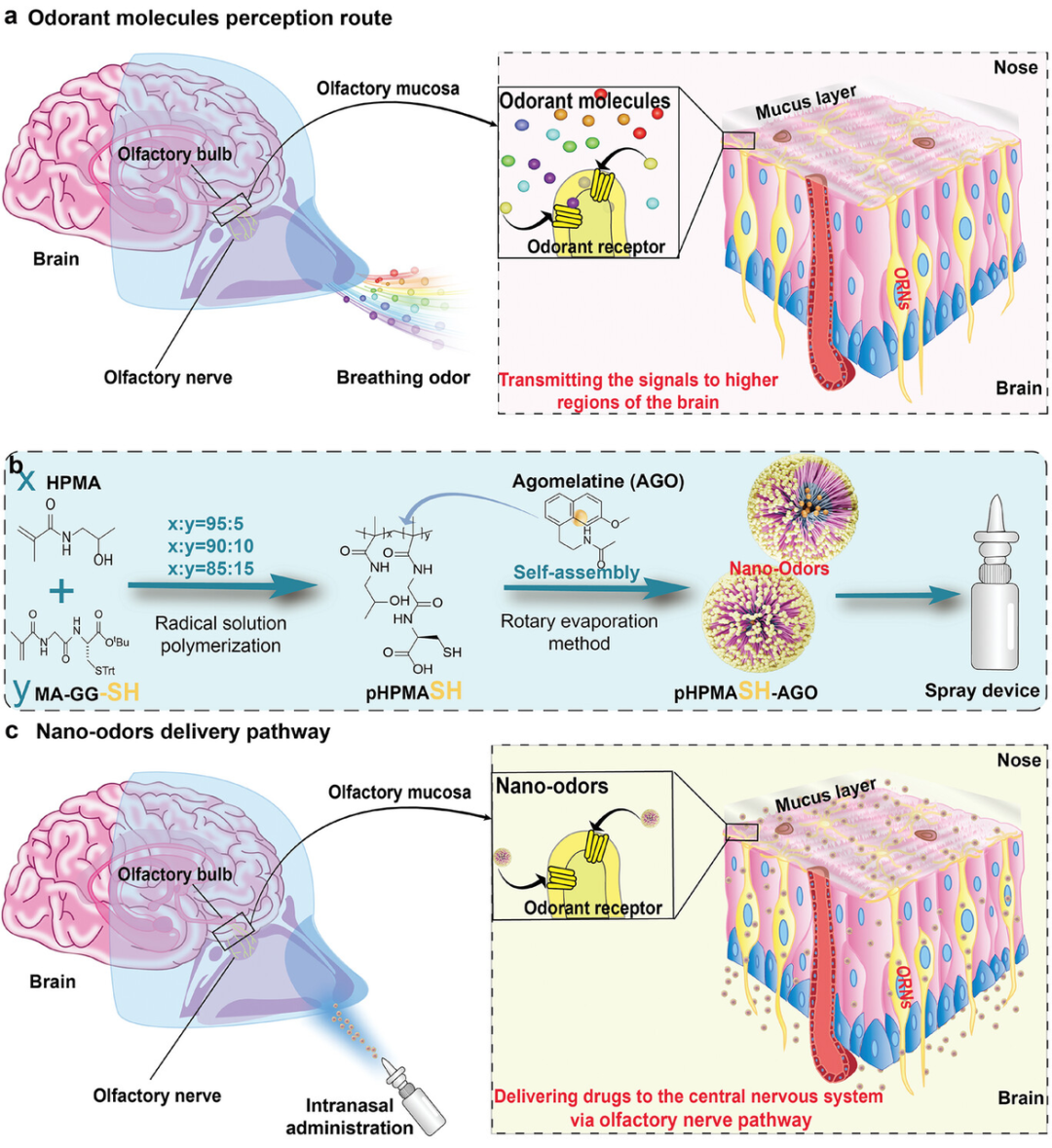
https://doi.org/10.1002/advs.202408908
END
编辑 | 罗虎
审核 | 医工学人理事会
扫码添加医工学人小助手,进入综合及细分领域群聊(国内外医工交叉领域顶尖高校、科研院所、医院、企业等专家学者、硕博士、工程师、企业家等),参与线上线下交流活动

推荐阅读
点击关注医工学人

本篇文章来源于微信公众号: 医工学人
