




星标“医工学人”,第一时间获取医工交叉领域新闻动态~


医工学人评论
揭示小脑在运动适应中的关键作用,为康复医学、人工智能和机器人技术的未来发展提供了新思路。
在日常生活中,我们无时无刻不在调整自己的动作:无论是学骑自行车、适应新球拍的重量,还是在湿滑的路面上保持平衡,我们的运动系统都具备强大的适应能力。这种能力被称为运动适应(motor adaptation),是人类精确控制动作、应对复杂环境的基础。
阻断小脑信号,观察大脑如何补偿
为了探究小脑在运动适应中的作用,研究团队设计了一项巧妙的实验。他们训练恒河猴在佩戴机械臂(Kinarm系统)的情况下完成一项触及任务。实验的关键在于,在某些训练阶段,研究人员人为施加了一种“粘性力场”(viscous force field),类似于让猴子在水下移动手臂,使其需要不断调整运动策略来适应这种外力。
科学家们采用高频电刺激(HFS)技术阻断猴子的小脑输出,观察大脑皮层是否能独立完成适应过程,以及会发生何种变化。
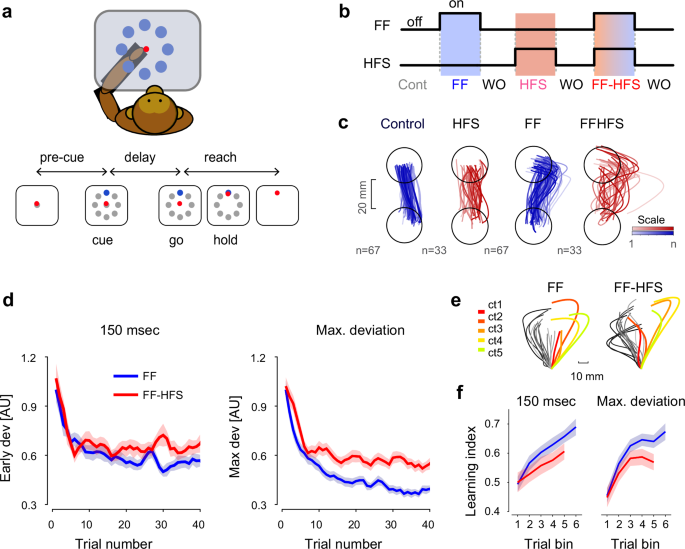
图1 实验设计与表现结果。
研究发现:小脑信号缺失会导致适应受损
实验结果表明,在小脑正常工作的情况下,猴子能够快速调整手臂运动,逐渐适应外部施加的力场,使运动轨迹趋于稳定。然而,在小脑信号被阻断后,猴子的适应能力显著下降,表现出:
-
运动轨迹更加不稳定,误差更大;
-
学习速率降低,适应新环境的时间明显延长;
-
对错误的敏感度下降,无法像正常情况下那样通过“试错”机制优化运动策略。
这些现象与小脑损伤患者的运动障碍非常相似,进一步证实了小脑在运动适应中的核心作用。
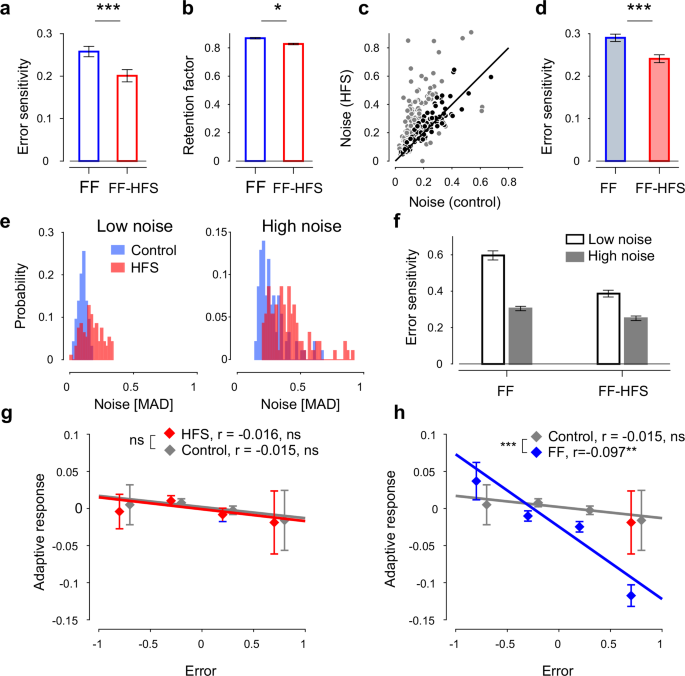
图2 高频电刺激对适应率的影响。
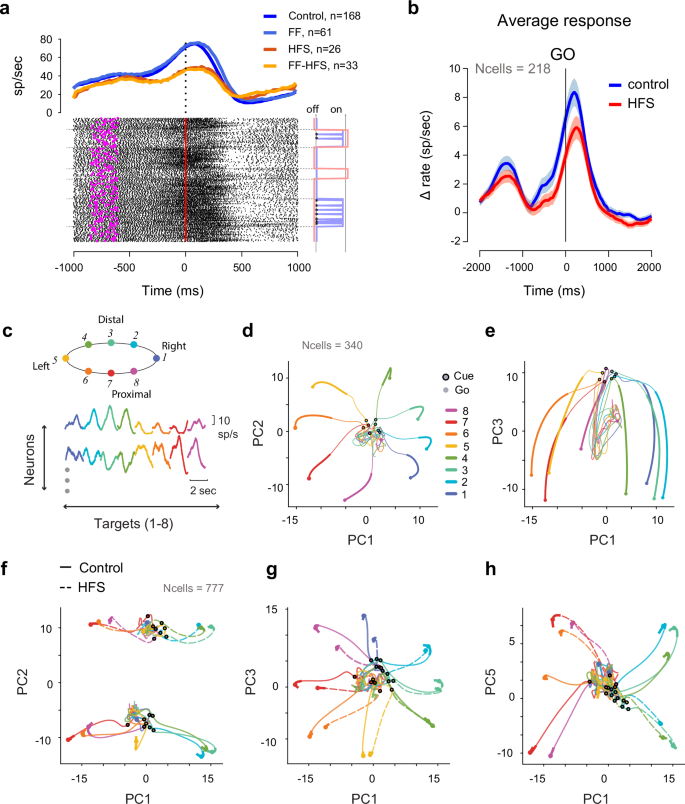
图3 HFS以靶标依赖性和独立方式改变神经活动。
进一步分析:大脑如何“弥补”小脑的缺失?
尽管小脑受阻后,猴子的运动适应能力下降,但研究人员发现,大脑皮层的活动模式发生了显著变化,似乎在尝试补偿小脑的功能。具体表现为:
-
运动前的神经活动变得更加复杂:相比于正常情况下的低维度、规则性强的神经模式,小脑受阻后,大脑皮层的活动维度增加,意味着运动控制的计算变得更加混乱。
-
皮层活动的“角度偏移”:研究人员发现,阻断小脑后,运动前的神经活动在某些特定方向上出现偏移,可能是大脑皮层试图通过改变运动规划来弥补适应能力的不足。
为了验证这一现象,研究人员构建了计算模型,模拟小脑与大脑皮层的相互作用。结果表明,小脑提供的反馈信号有助于保持大脑皮层运动规划的低维度结构,使运动控制更加稳定、泛化能力更强。当小脑信号缺失时,大脑皮层被迫自行调整,但其适应能力和泛化能力受到严重影响。
从脑科学到人工智能的广泛应用
这项研究不仅深化了我们对运动适应的神经机制理解,还可能对多个领域产生深远影响:
-
脑损伤康复:对于中风、帕金森病或其他神经系统疾病患者,这项研究表明,小脑受损后,大脑皮层仍能部分补偿其功能。未来的康复训练可以针对这一机制,设计促进大脑皮层补偿性调整的治疗方法,如神经调控技术或个性化康复训练。
-
人工智能和机器人控制:目前,大多数机器人在适应复杂环境(如不规则地形或未知干扰)方面仍然存在很大挑战。而人类能快速适应,是因为小脑在幕后发挥作用。如果能在机器人运动控制系统中引入类似的小脑反馈机制,未来的机器人可能会更加灵活和智能,能够自主适应新环境。
-
运动训练和增强:研究表明,小脑的作用不仅限于适应新环境,还影响运动技能的泛化能力。这意味着,在运动员训练、康复训练、甚至增强现实和脑机接口技术中,都可以利用这些发现,优化运动学习过程。
扫码添加医工学人小助手,进入综合及细分领域群聊(国内外医工交叉领域顶尖高校、科研院所、医院、企业等专家学者、硕博士、工程师、企业家等),参与线上线下交流活动

推荐阅读
点击关注医工学人



本篇文章来源于微信公众号: 医工学人
