




星标“医工学人”,第一时间获取医工交叉领域新闻动态~


前言
/
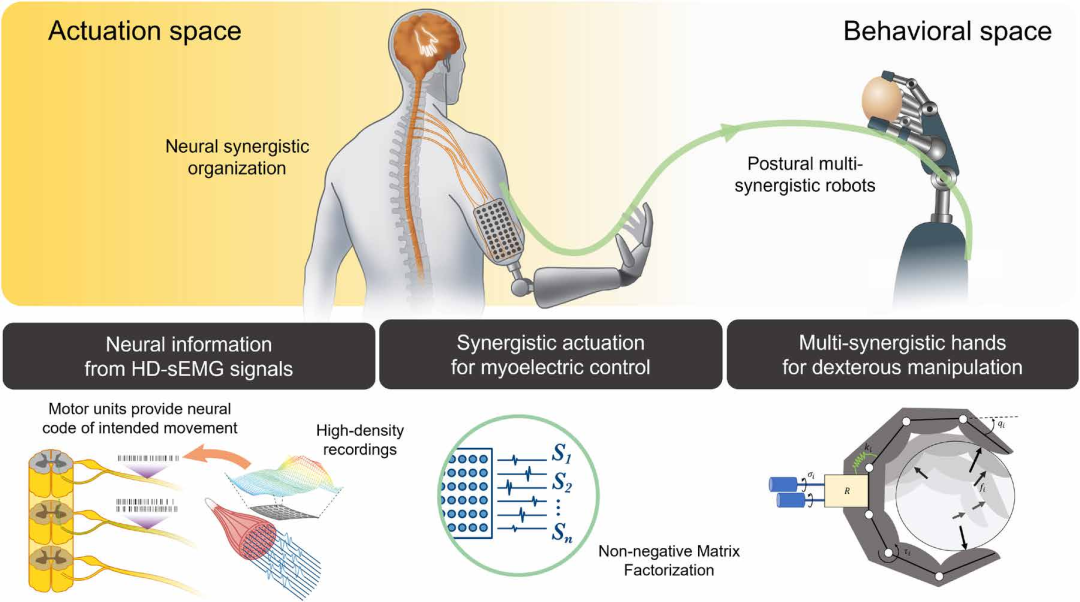
这项工作探索了行为和驱动空间的协同作用。针对于多协同假手的自然仿生控制,包括实现灵巧的操作任务,本文提出了一种协同控制方法,该方法结合了姿势协同作用与基于手指预期运动的脊髓运动神经元解码。
“用于灵巧操作的多协同手” 部分中的箭头表示物体与机械手指尖的接触力。 qi 定义了抓取动作期间系统的最终几何形状。
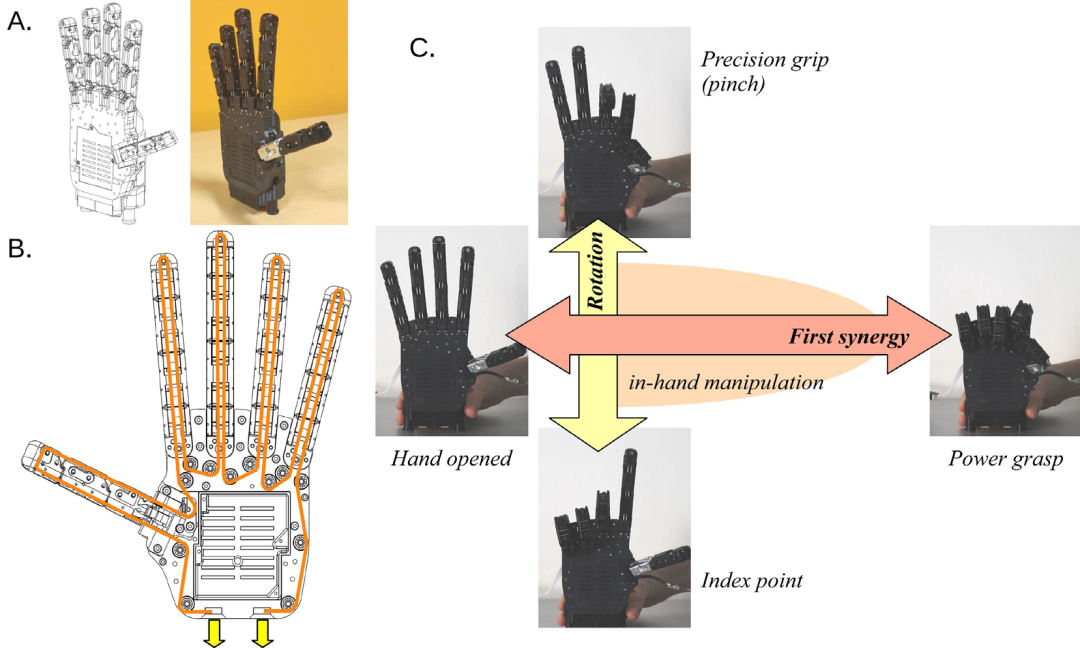
(A)机械假肢的 CAD 设计与实现。
(B)系统的实现路径。每侧的肌腱由一个自由度(用黄色箭头表示)牵引。以这种方式,手的所有关节都由两个电机的协调运动主动控制来展示不同的手牌行为。
(C)所提出的框架的理论工作空间。垂直箭头展开了此假肢处理器中嵌入的第一个 协同作用,允许手指的旋转包括额外的抓握模式和手部操作。通过逆时针方向实现手部操作以及手指顺时针旋转,从而对抓取的物体施加不同的接触力。
神经元与肌肉协同
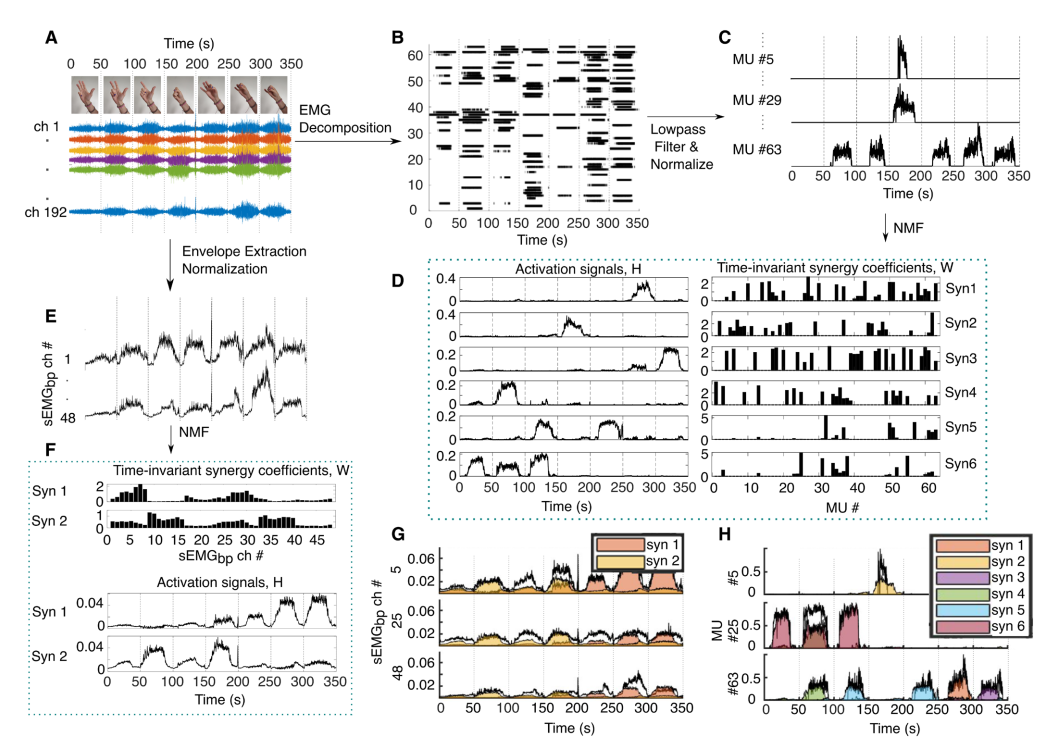
(A) 为每个手部姿势采集的级联 192 通道高分辨率sEMG 信号。
(B) 从 HD-sEMG 信号解码的 MU 活动的光栅图。
(C) 低通滤波和归一化的单个 MU 尖峰序列。
(D) 由 nMF 算法计算的激活信号(左)和时不变的 Mn 协同系数(右)的绘图。(E) 整流和低通滤波的 eMG 信号。
(F) 时不变的肌肉协同系数(上)和激活信号(下)。
(G) 三个 EMG 通道(彩色)和原始校正 EMG 信号上的每个肌肉协同作用产生的重建肌肉激活示例(黑色实线)
(H) 由三个 MU 和原始 SDR(黑色实线)上的 Mn 协同作用产生的重建 MU 激活模式的示例。
离线分析
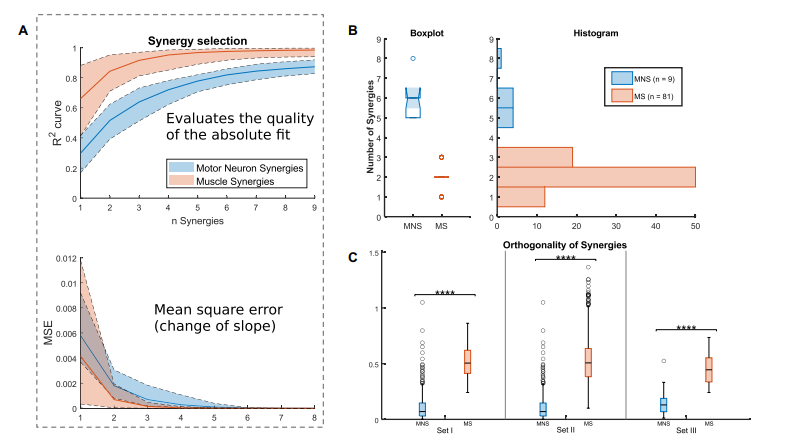
(A)协同效应和可变性的计算考虑了根据 R2 曲线和 MSe 的协同效应数量。(B)MN 协同作用(图中称为 MNS)和肌肉协同作用(图中称为 MS)之间的维度比较,均使用 nMF 提取。对于每个参与者,尝试了 9 种不同的传感器配置(最少 12 个双极到 192 个单极)来确定在线实验期间提取肌肉协同作用的理想配置。
(C)MN 和肌肉协同作用之间的特异性分析。从左到右:将I、Set II 和 Set III。
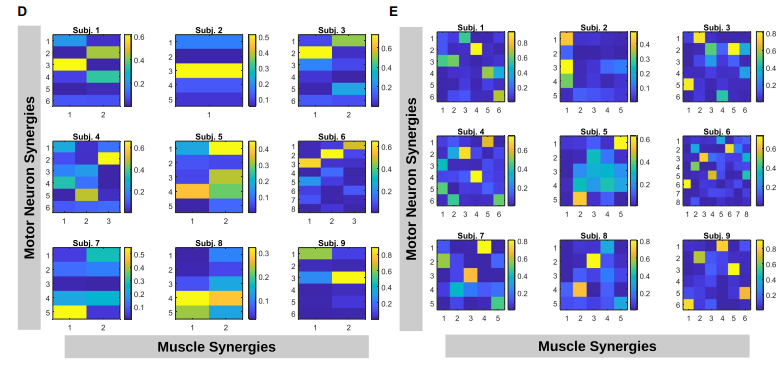
(D)对于每个参与者,第 i 组中 MN和肌肉协同作用之间的相似程度,这表明共享和缺失的信息。
(E)度数集合 II 中 MN 和肌肉协同作用之间的相似性,以观察协同作用的维度在数量上匹配时的共同信息
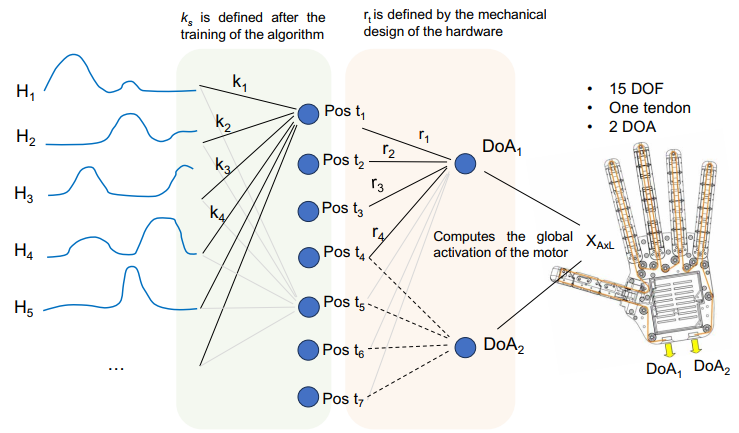
协同激活矩阵 HS×L 与训练的姿势(矩阵 PT×L)相关,每行在此可视化中名为 Pos ti),然后通过矩阵 KT×S. 将它们转换为用于执行手部动作的多协同假肢手,称为 XA×L。S 是提取的协同效应的数量,T 是训练算法的任务或手部姿势的数量,A 是Doas 的 Dos,L 是收集的原始数据集的总长度。
在线分析
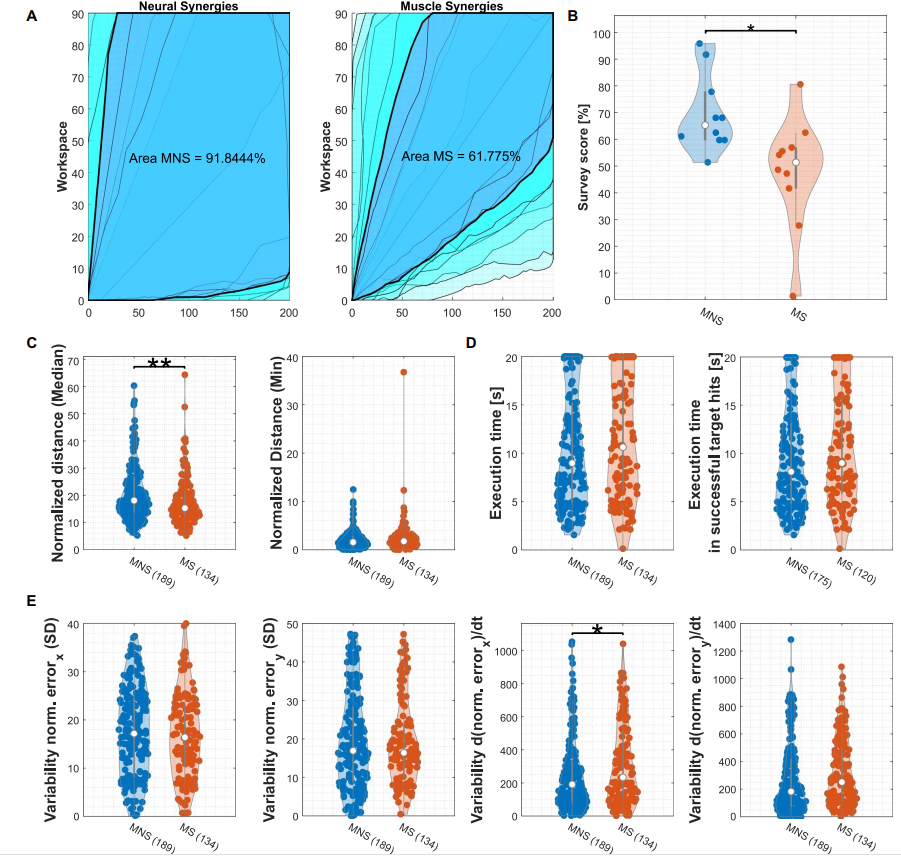
MS 是指肌肉协同作用的结果,MNS 对应于MN协同效应。
(A) 控制条件和每个参与者的可用工作区。计算了一个具有代表性的可控空间(图中的深蓝色区域)11 名参与者中有 6 名以上可以达到一组点。
(B) 每种控制方法的自我评价调查的分数(以百分比表示)。
(C) 性能与命令光标与要到达的目标之间的标准化距离相关的指标。这是以与设备无关的像素来衡量的。
(D) 性能指标与所有参与者中每个目标的执行时间相关。
(E) 每个 DoF 的光标轨迹变化由归一化误差的 SD 表示在两个轴上。光标轨迹在两个轴上的平滑度由归一化误差随时间的变化率表示。
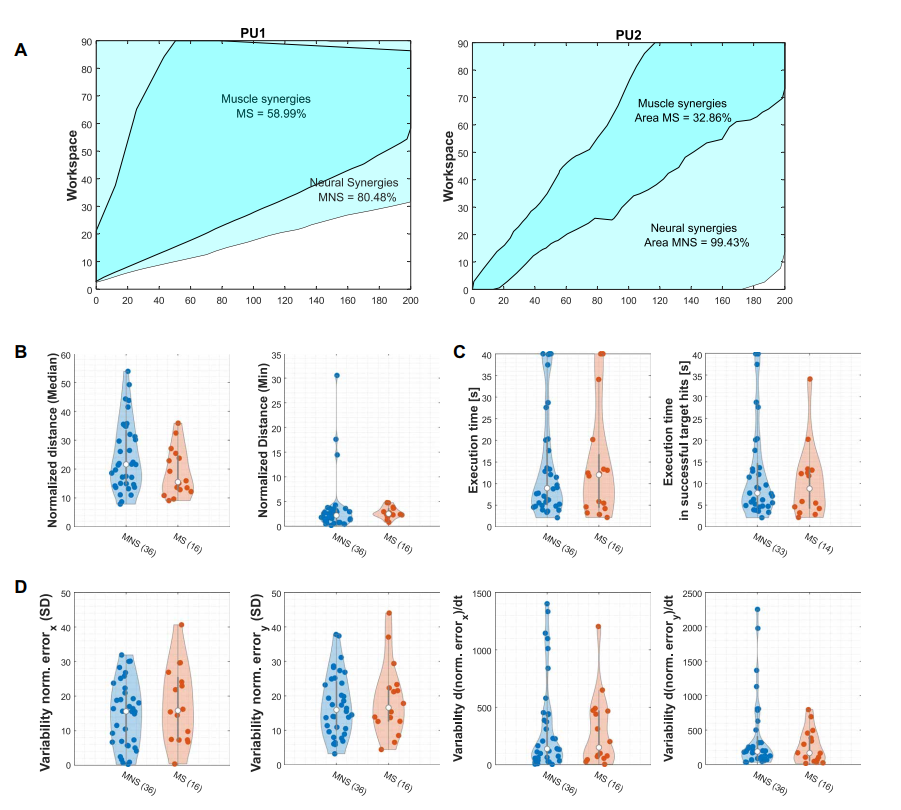
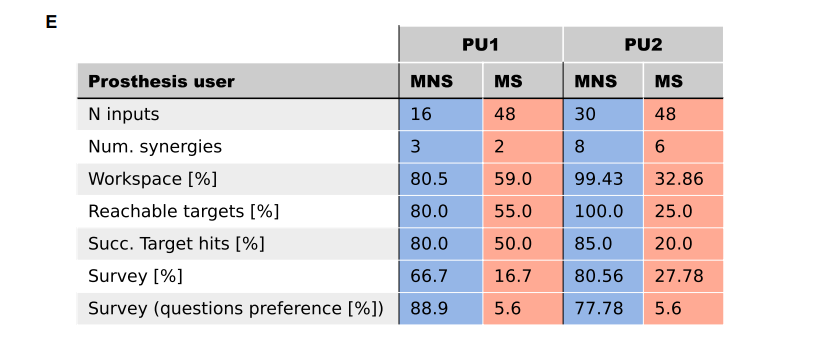
(A) 每个控制条件的可访问工作区及其两个参与者的面积百分比。MS 是指肌肉协同作用的结果,而 MNS 对应于 MN 协同作用。
(B) 与命令之间的距离相关的性能指标cursor 和 target 来达到。
(C) 与执行时间相关的性能指标。
(D) 有关每个 DoF 的轨迹可变性的性能指标。所有图表用小提琴图报告数据的离散度,对于所涉及的两个修复体用户,每个条件的中位数都标记为白色。
(E) 中的表格报告了一些在线实验的主要结果和参与者调查分数。
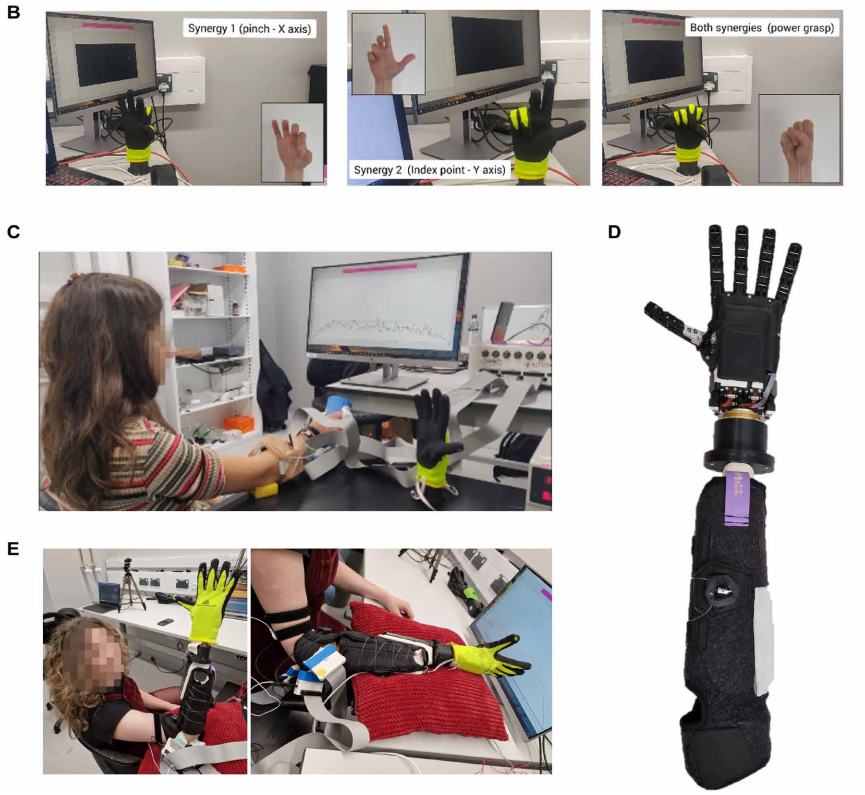
实验演示
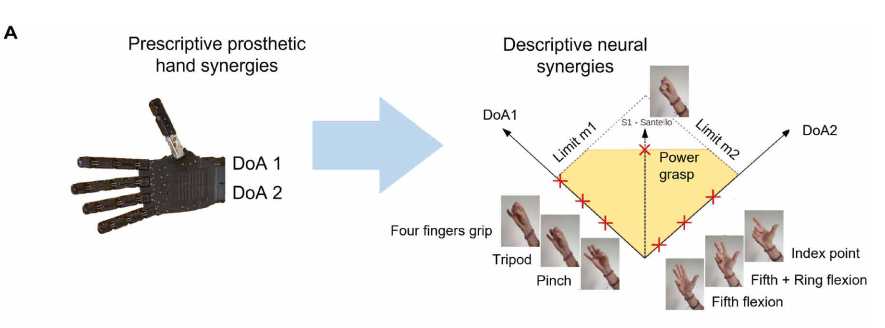
(A) 七种手部姿势, pi , 及其在假肢工作空间中的实现。在这种方法中,作者设计了完整的解决方案从规定的手部协同效应(由机器人中的可用运动施加)开始,到观察到的 pi的描述性神经协同效应。
(B)在线实验期间,要求参与者执行虚拟 Center-Out 目标到达任务。
(C) HD-sEMG 数据的记录框架和目标轨迹。
(D) 集成软多协同手和软插座。
(E)全系统集成显示HD-sEMG 传感器在软插座上的组合、柔软的多协同手和实时神经协同控制。
结论
在机器人设备的设计过程中,选择适当的规定性协同作用,即由现有控制系统规定和固定的协同作用,是一项艰巨的任务。在人类中观察到的行为不一定揭示神经系统使用的所需控制,即规定的神经协同作用。在这项工作中探索了一种结合了姿势和神经协同作用的假肢设计和仿生接口方法。作者假设从 MN 协同作用中识别出更具体和可控的抓取协调模式,可能基于此构建一种稳健且自然的仿生接口方法。
总之,文章展示了一种自然仿生设计和接口的方法,该方法控制了通过脊髓 MN 的神经协同作用的假手,证明了机械手和神经信息提取算法的协同协同设计可以为用户提供一个自然的模块化控制,跨越 2D 空间的无限姿势,同时降低物理机器人设备和控制算法。后续,需要进一步的研究来充分证明神经协同的可用性信息及其在实验室环境之外的应用。此外,未来的研究应旨在了解人类通过 CNS 灵活控制 MN 协同作用的能力。
▼参考资料
*本文仅分享医工交叉前沿进展,不代表平台利益。如涉及版权问题,请联系我们删除。
END
扫码添加医工学人小助手,进入综合及细分领域群聊,参与线上线下交流活动

推荐阅读
点击关注医工学人



本篇文章来源于微信公众号: 医工学人
