




星标“医工学人”,第一时间获取医工交叉领域新闻动态~

前言
/
过去十年,软体机器人领域经历了巨大的发展。与传统机器人不同,传统机器人的大部分研究由机械、电子或软件等工程学科组成,而材料在软体机器人中起着关键作用。在这方面,橡胶和硅酮等典型弹性体由于其弹性和柔顺性而在该领域得到广泛应用。尽管如此,目前的趋势正在转向智能软材料,因为它们可以开发更紧凑、更强大的机器人,具有智能,而无需复杂的设计或控制策略。最终,使用智能材料的目的是在机器人中复制生物的能力,这产生了“生物启发”一词。
本研究由西班牙卡斯蒂利亚-拉曼查大学的团队完成,详细内容于8月5日报道在了《ACS ·纳米材料》杂志。
水凝胶弯曲运动
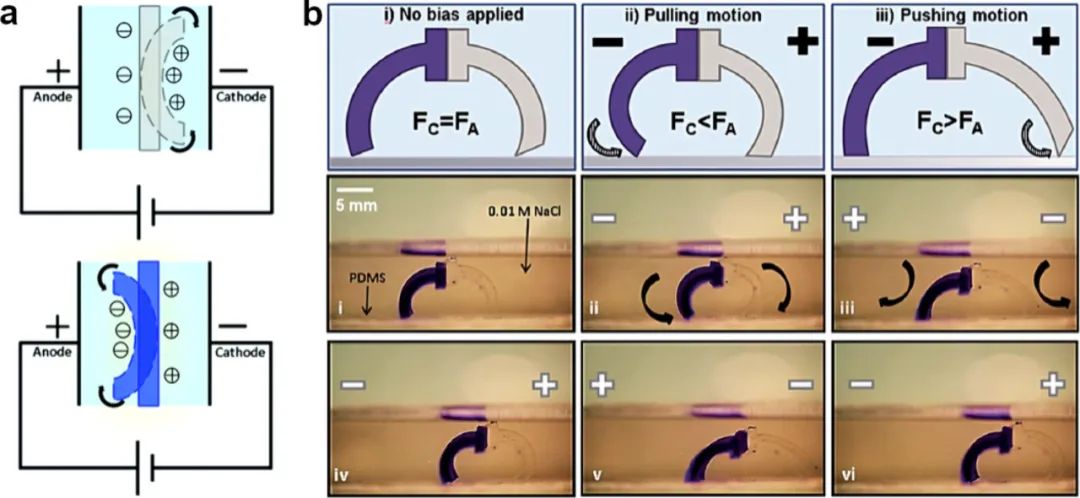
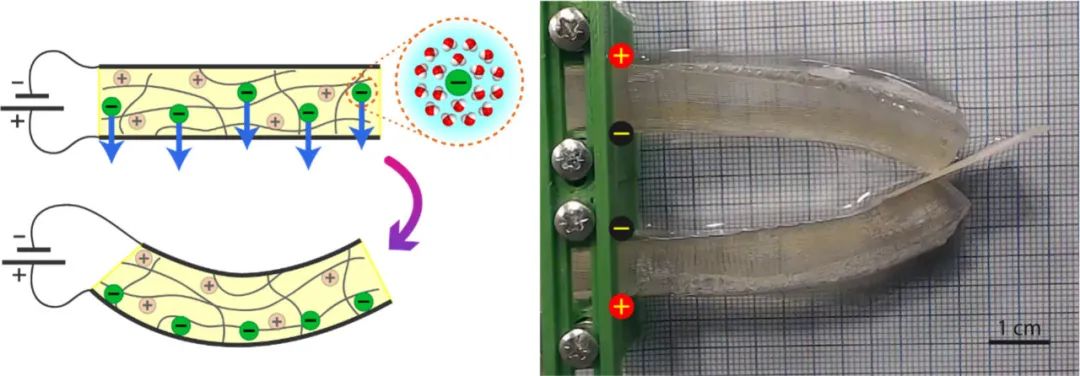
空气条件下阳离子水凝胶的弯曲响应
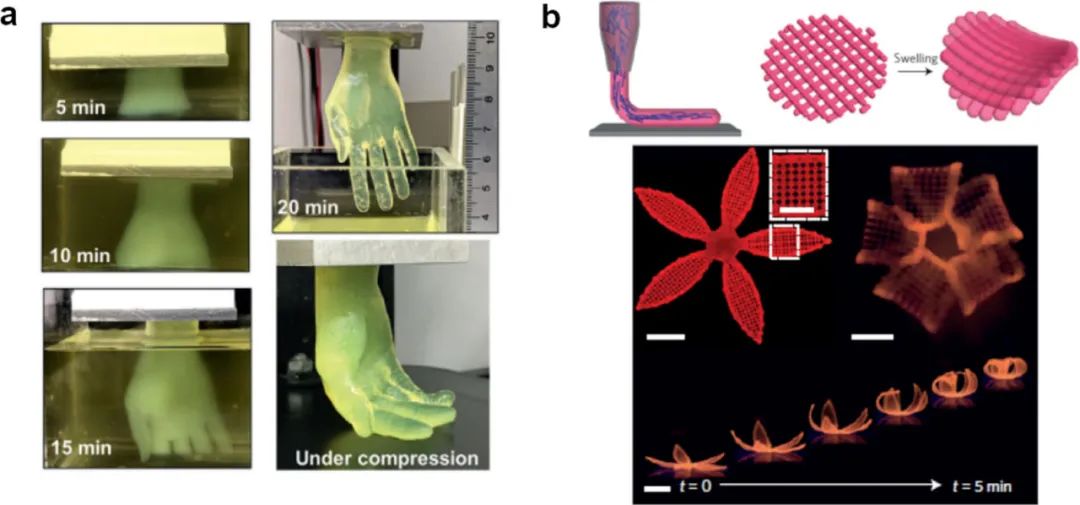
水下驱动结构
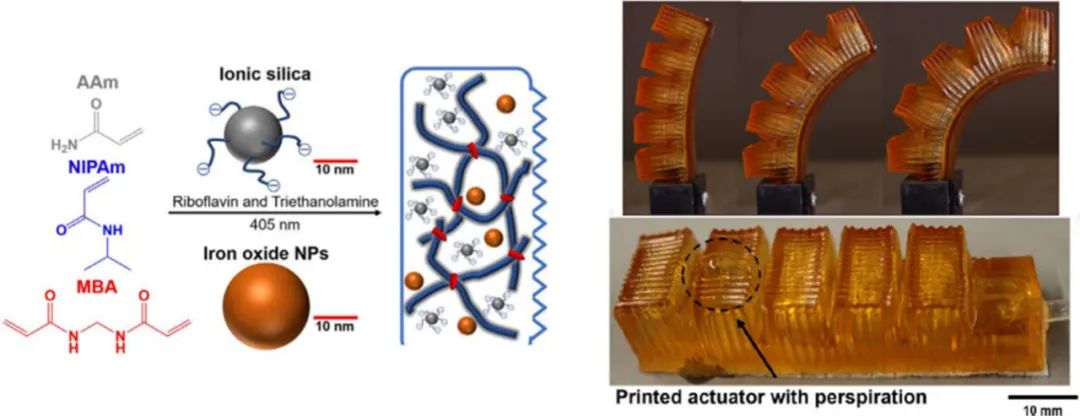
具有排汗功能的流体弯曲执行器
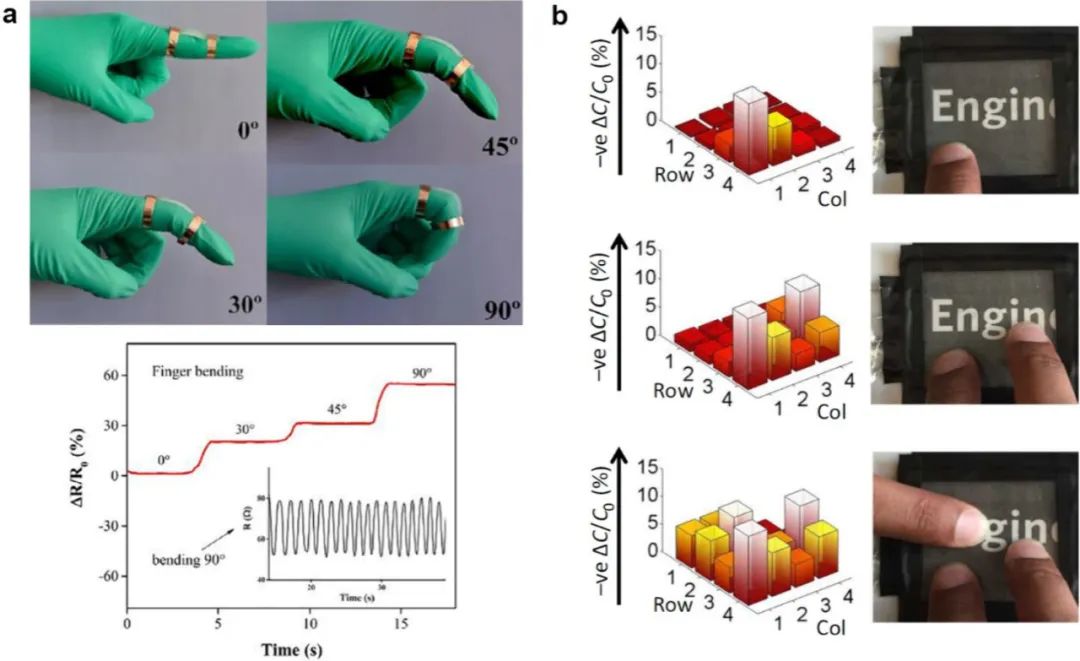
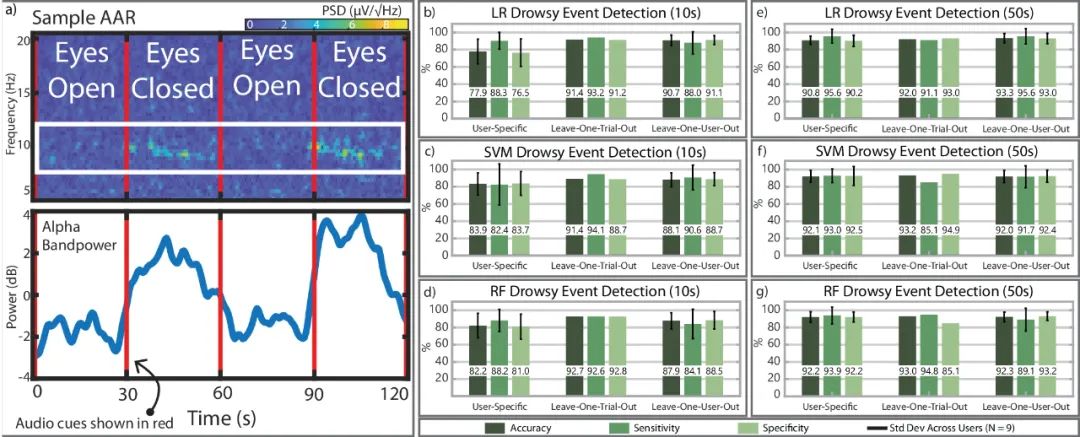
用于运动测量的离子水凝胶
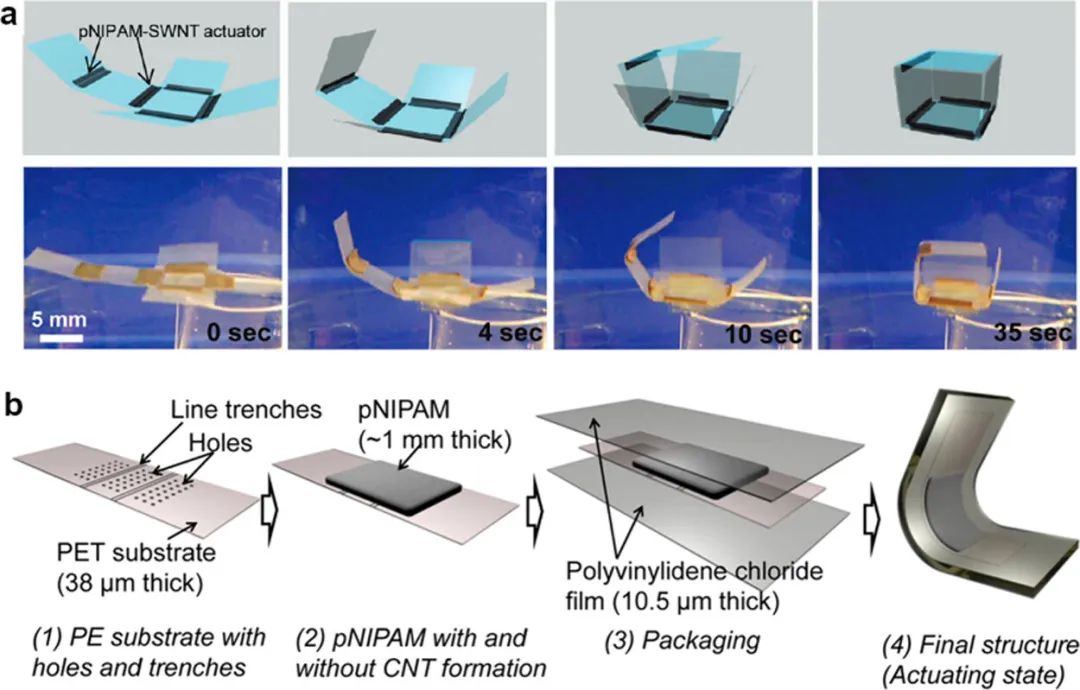
多维打印的水凝胶
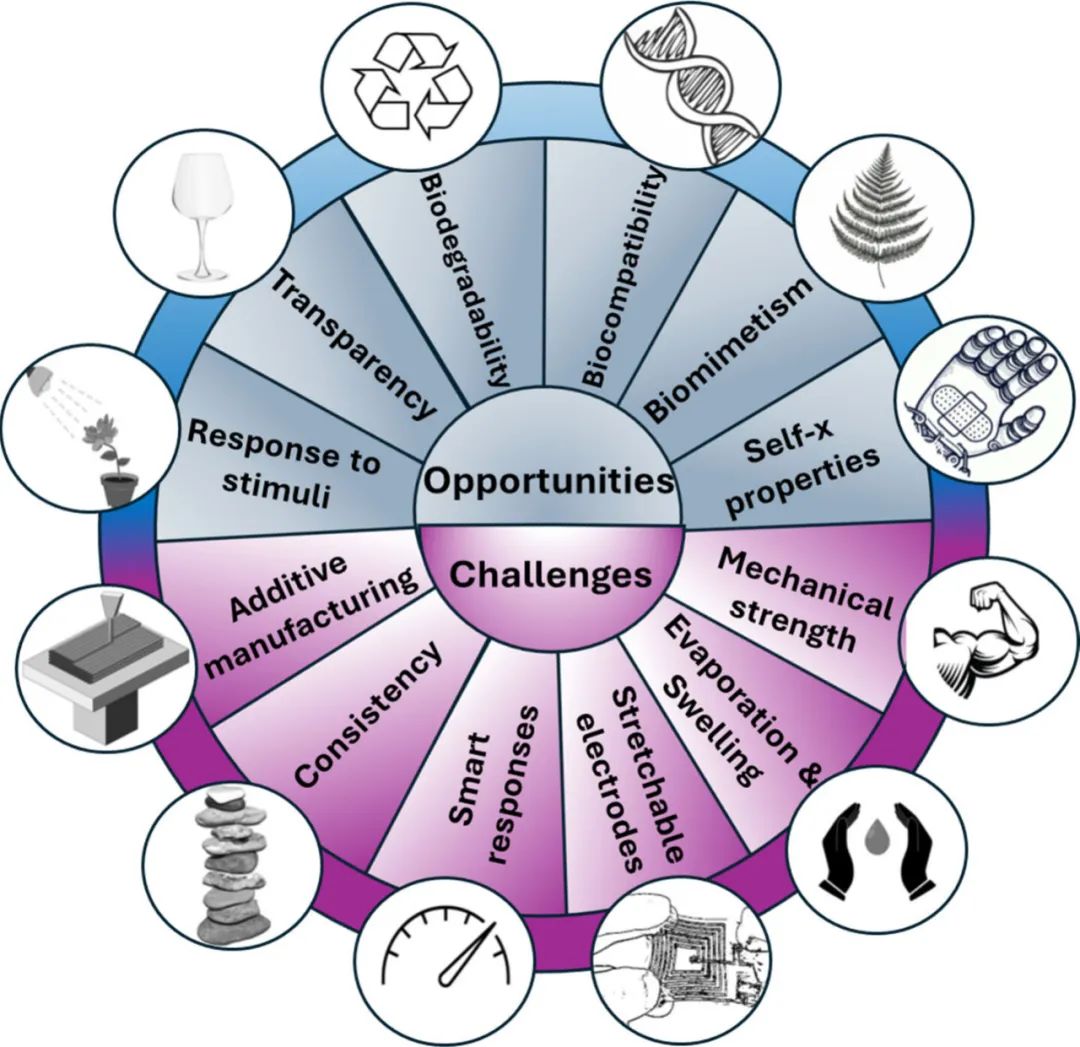
水凝胶在软机器人领域面临的挑战和机遇
结论
▼参考资料
*本文仅分享医疗科技前沿进展,不代表平台利益。如涉及版权问题,请联系我们删除。
END
编译 | 刘帅
来源 | ACS Nano
审核 | 医工学人理事会(罗虎)
扫码注册加入医工学人,进入综合及细分领域群聊,参与线上线下交流活动

*声明:医工学人为公益性非盈利组织,不收取任何注册费用,注册申请通过后将以邮件通知
点击关注医工学人



本篇文章来源于微信公众号: 医工学人
