




星标“医工学人”,第一时间获取医工交叉领域新闻动态~

前言
/
关键要点
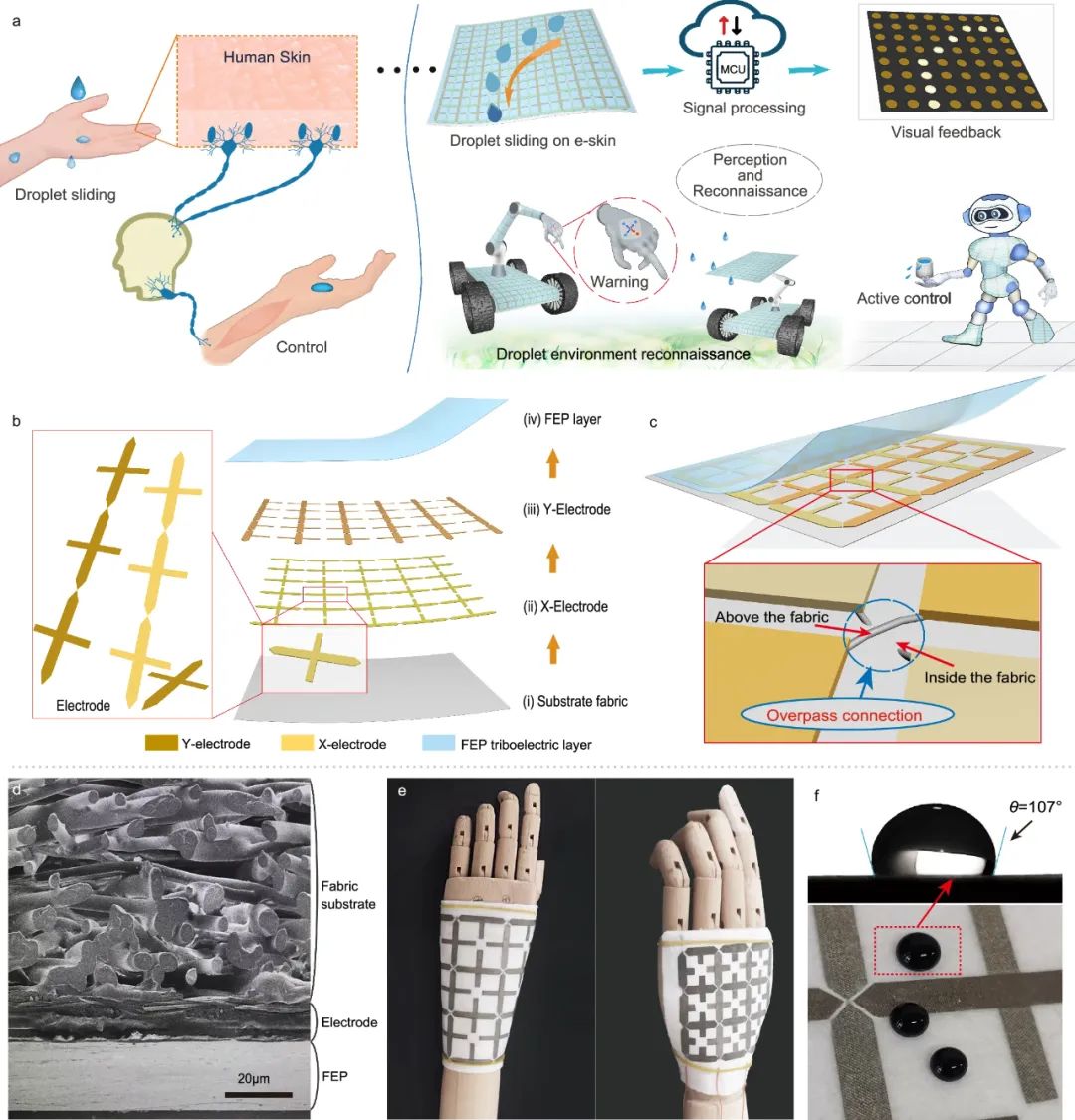
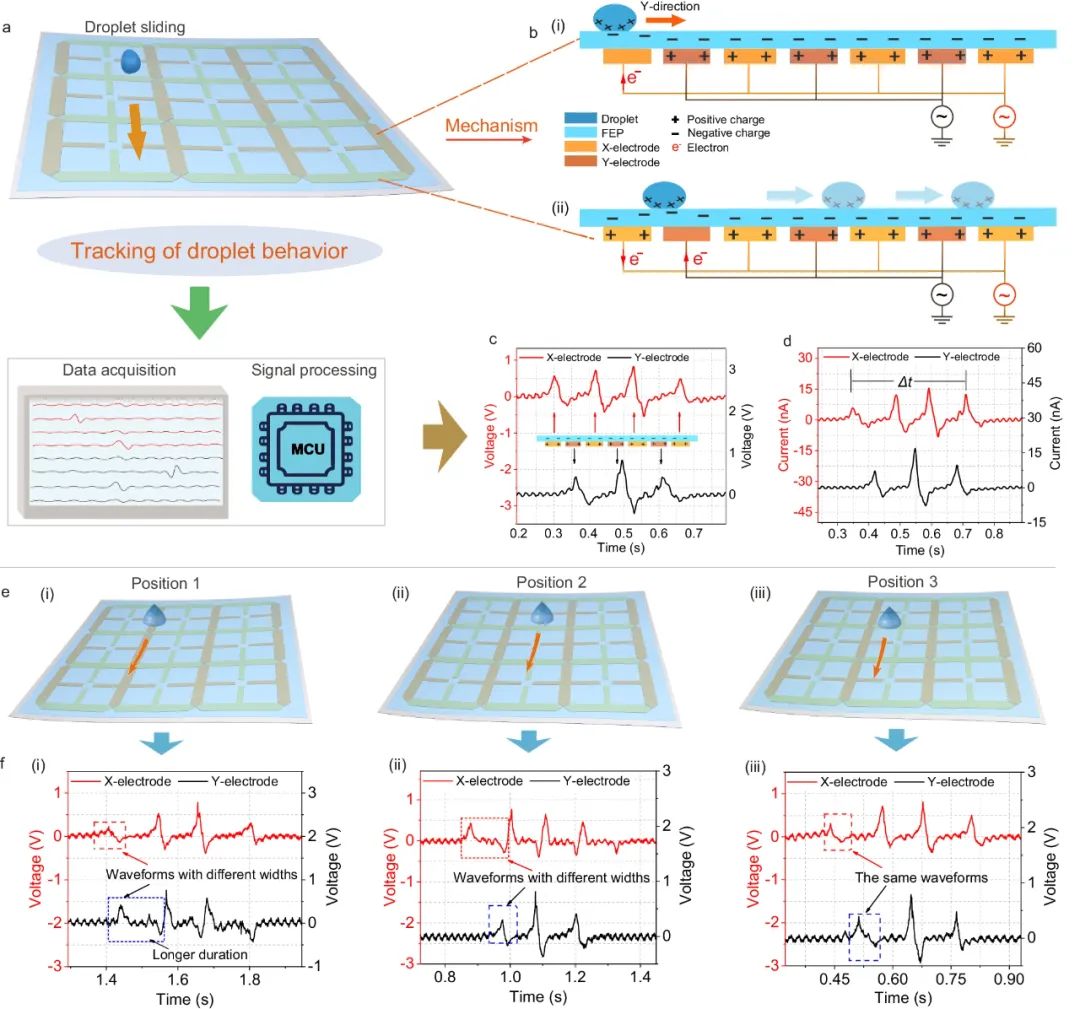
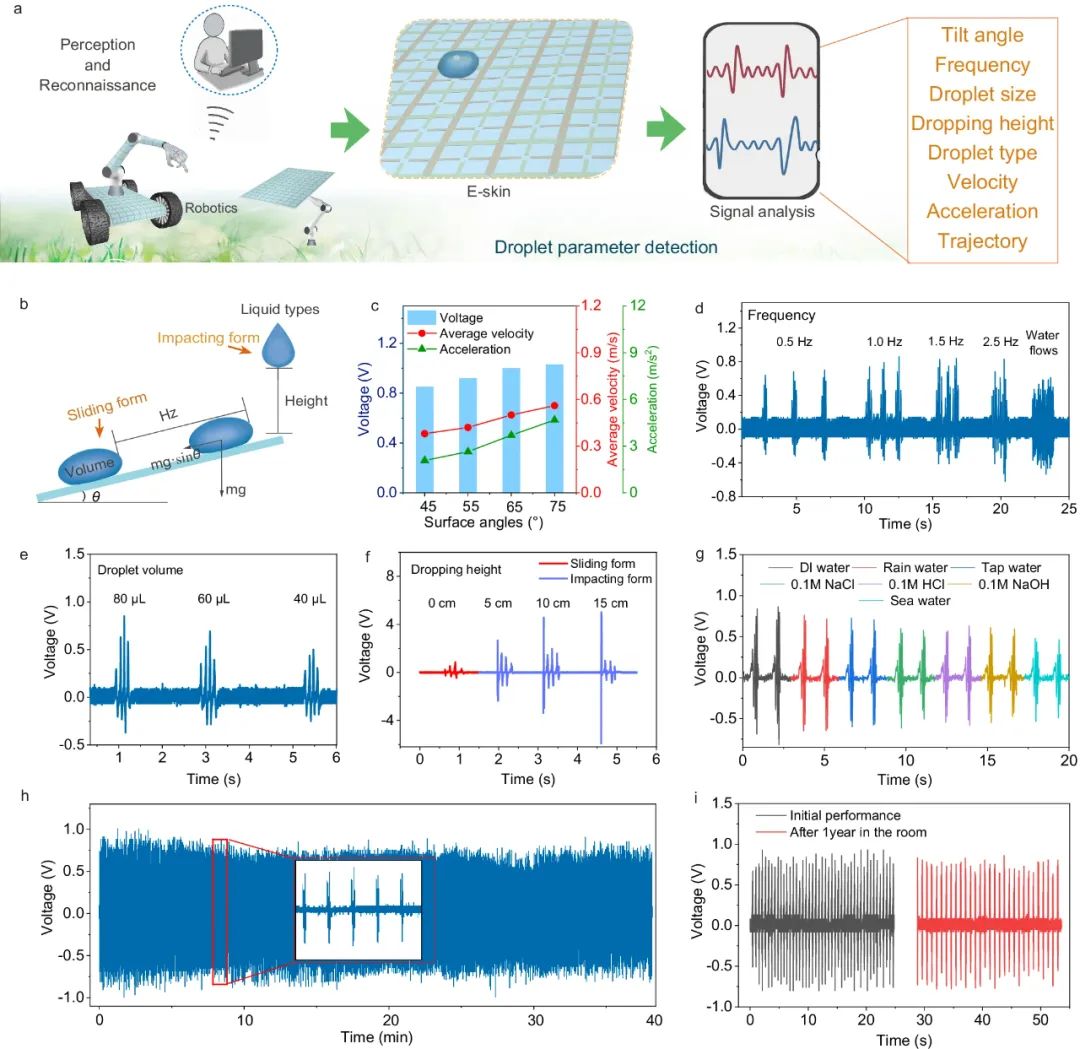
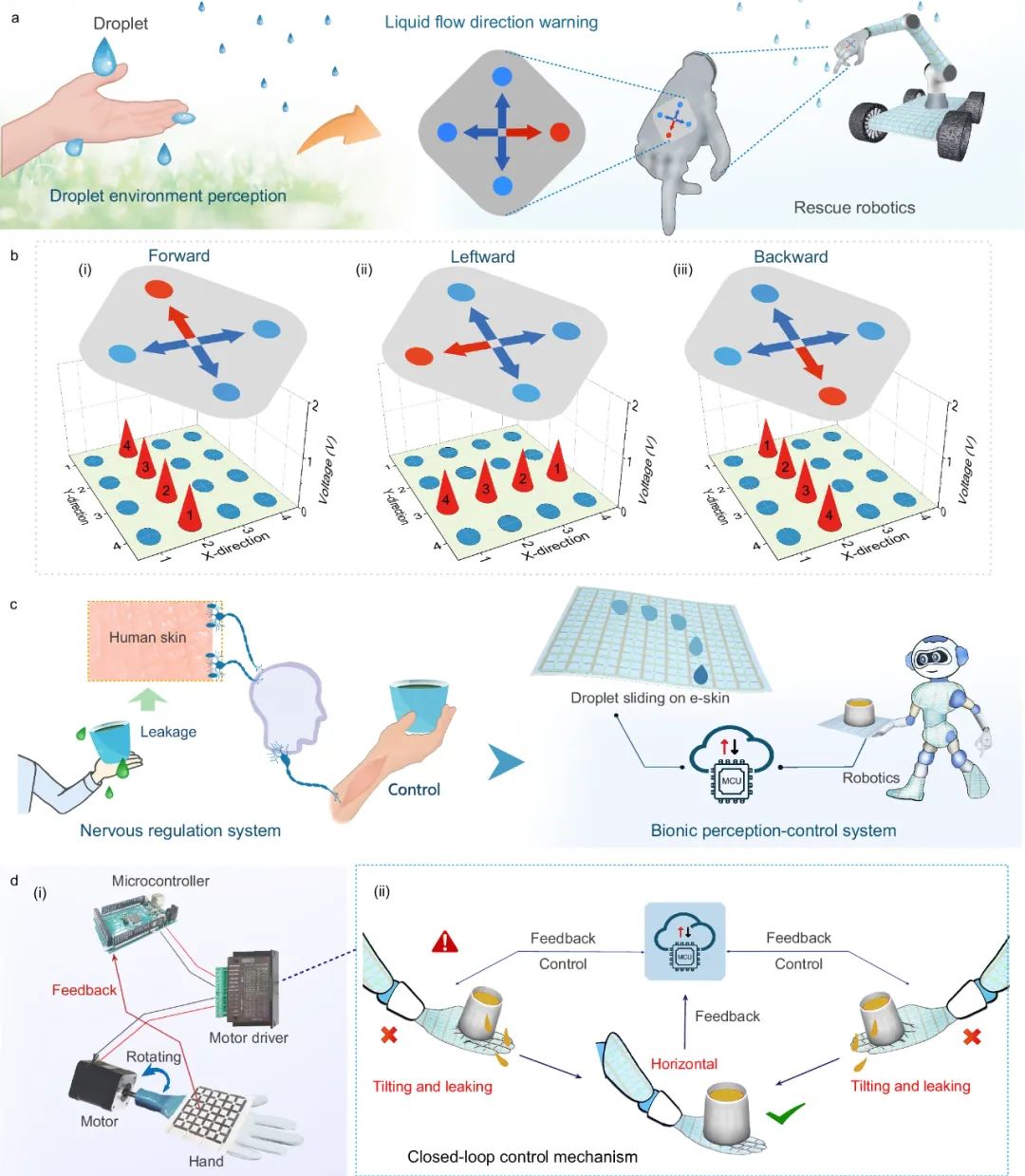
为了使智能机器人设备在常见的液滴环境中具有增强感知和自主调控的能力,需要开发能够深度全面检测液体信息的电子皮肤。目前,电子皮肤的一个技术限制是无法像人一样真实地感知液体滑动信息并及时反馈。针对这一关键挑战,本文通过构建巧妙的共层交织电极网络和采用跨桥连接方式,提出了一种自供电的仿生液滴电子皮肤。该仿生皮肤用于液滴环境侦察,将各种动态液滴滑动行为转换为基于摩擦电的电信号。更重要的是,电子皮肤可以全面感知液滴的二维滑动行为,并在指示器上实时直观地反馈。此外,该电子皮肤还实现了流向预警和漏水智能闭环控制,达到了人体神经调控的效果。这一策略弥补了电子皮肤感知液滴的局限性,大大缩小了人造电子皮肤与人体皮肤在感知功能上的差距。
本研究由东华大学、中国科学院苏州纳米技术与纳米仿生研究所和新加坡国立大学的团队合作完成,详细内容于7月17日报道在了《自然·通讯》杂志。
工作机制和信号特性
DES 灵敏度和稳定性的表征
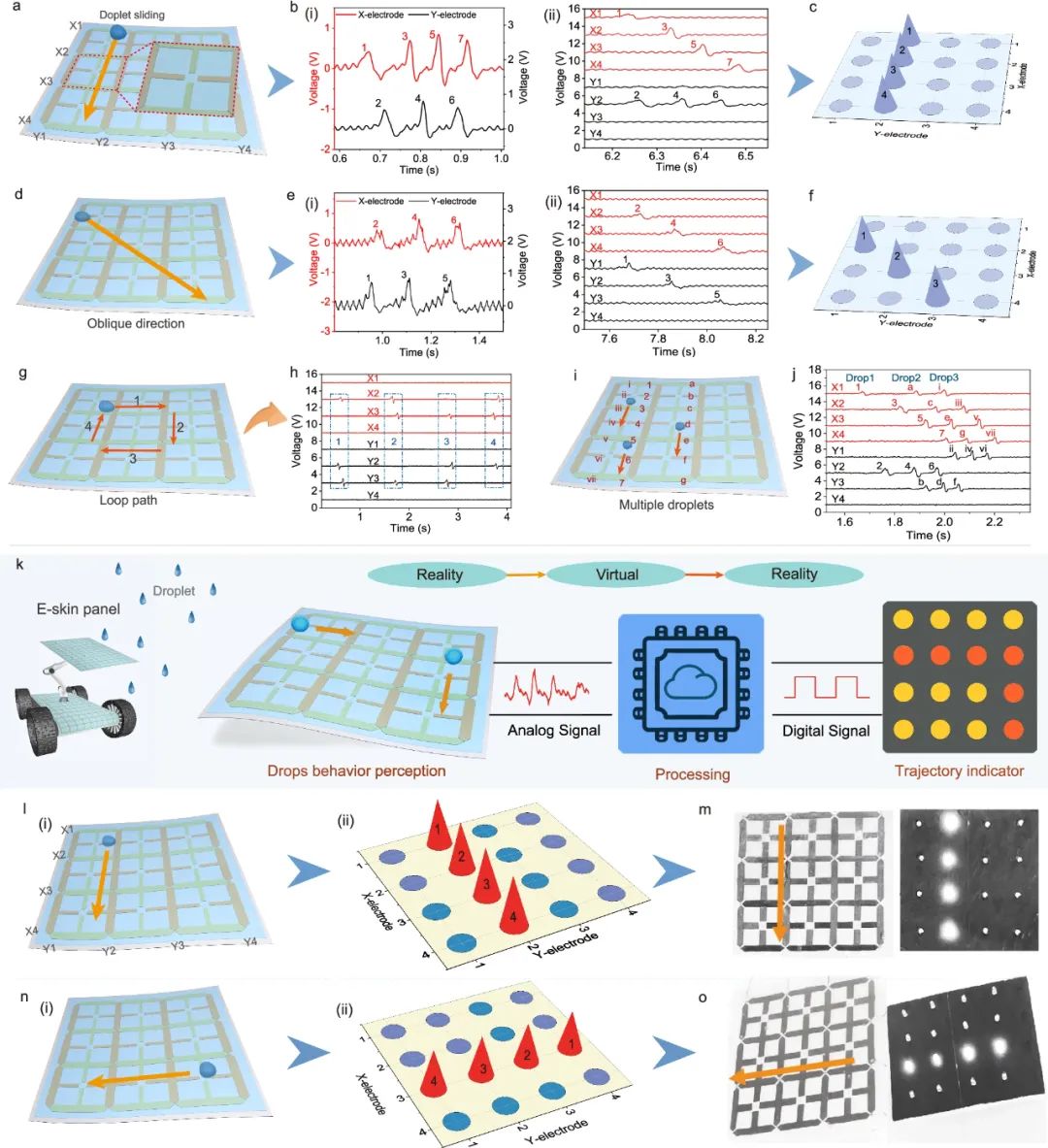
仿生 DES 的深度感知和视觉反馈
增强液滴滑动的感知和自主调节
结论
▼参考资料
Xu, Y., Sun, Z., Bai, Z. et al. Bionic e-skin with precise multi-directional droplet sliding sensing for enhanced robotic perception. Nat Commun 15, 6022 (2024). https://doi.org/10.1038/s41467-024-50270-8.
*本文仅分享医疗科技前沿进展,不代表平台利益。如涉及版权问题,请联系我们删除。
END
编译 | 刘帅
来源 | Nature Communications
审核 | 医工学人
扫码注册加入医工学人,进入综合及细分领域群聊,参与线上线下交流活动

*声明:医工学人为公益性非盈利组织,不收取任何注册费用,注册申请通过后将以邮件通知
点击关注医工学人



本篇文章来源于微信公众号: 医工学人
