




星标“医工学人”,第一时间获取医工交叉领域新闻动态~

前言
/
关键要点
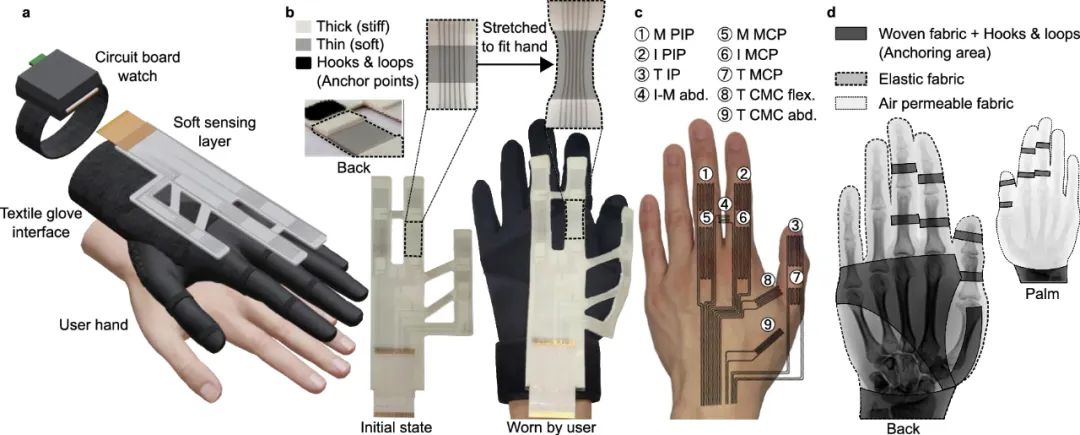
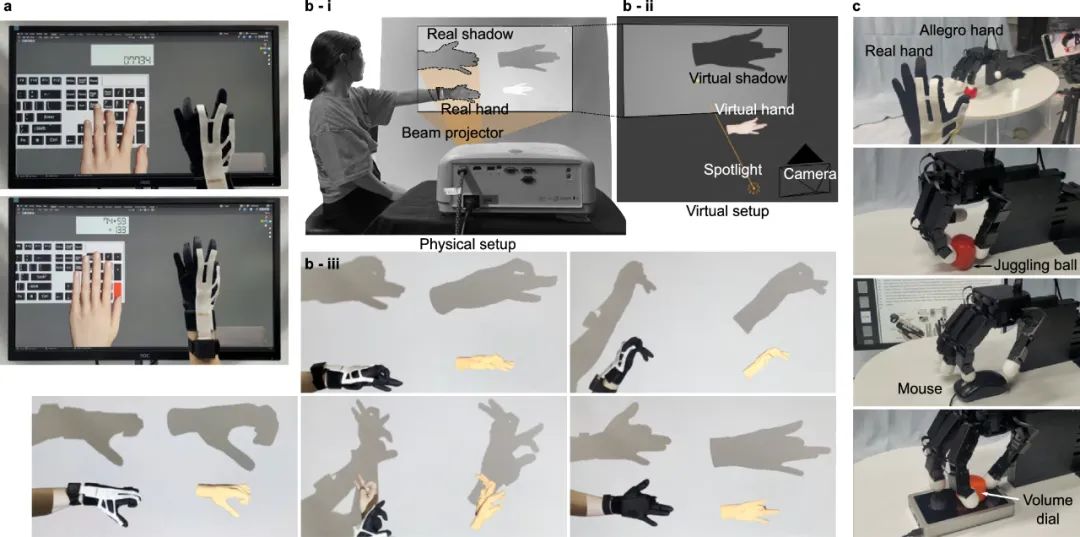
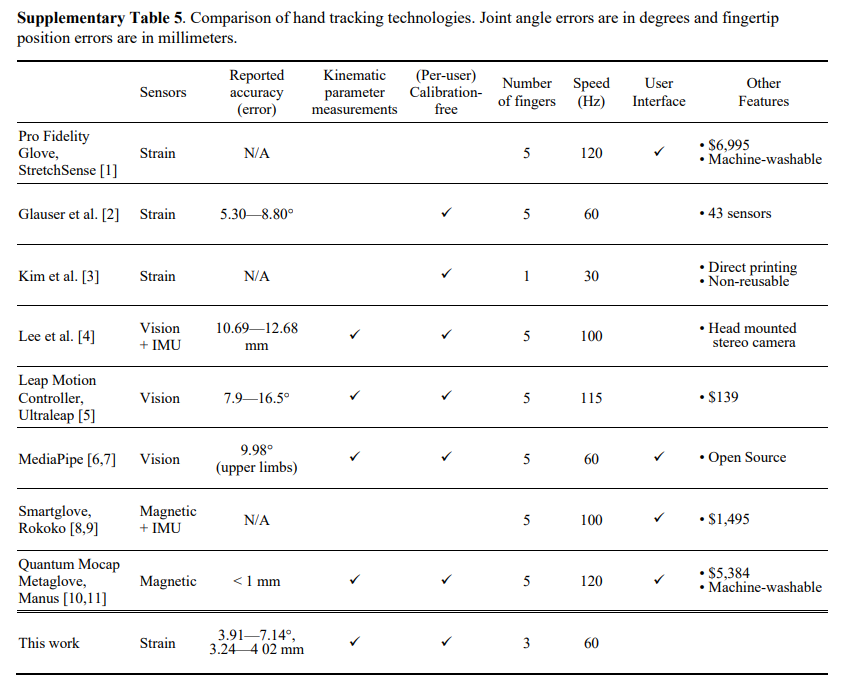
作者提出了一种紧凑型的可穿戴手套,它能够通过简单的基于拉伸的传感机制来估计佩戴者的手指骨长度和关节角度。这种柔软的传感手套设计为易于拉伸且通用尺寸,既可以测量手的大小,又可以估计拇指、食指和中指的手指关节运动。
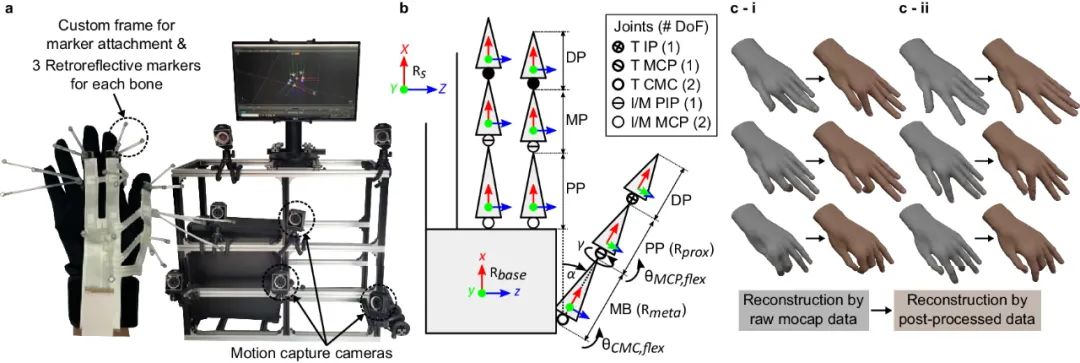
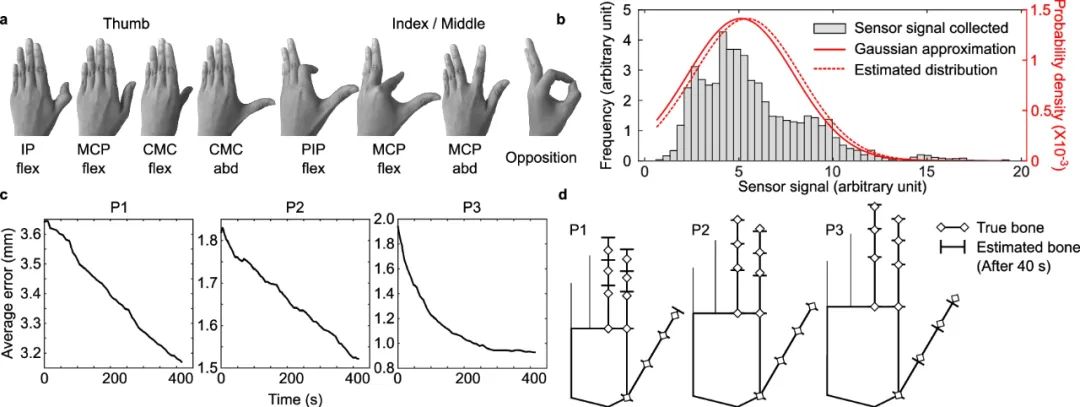
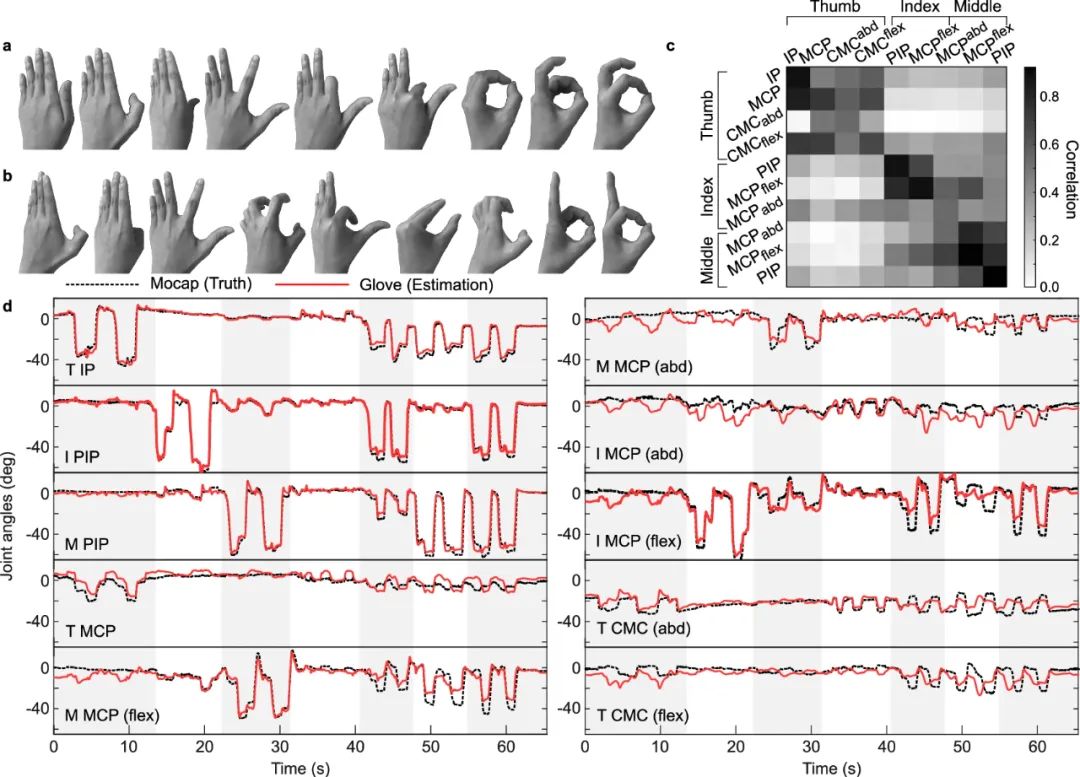
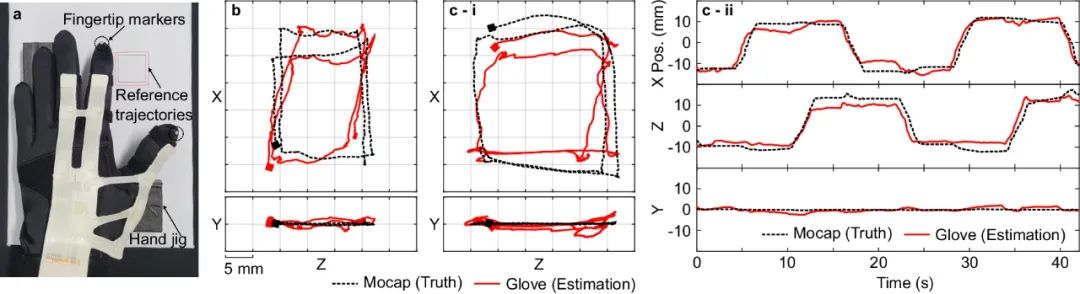
该系统使用全面的手部运动数据进行校准和评估,这些数据反映了广泛的自然人类手部运动和各种解剖结构。数据是通过自定义运动捕捉装置收集的,并通过我们的后处理方法转换为关节角度。手套系统能够准确、稳健地重建任意甚至非常规的手部姿势,这通过对骨骼长度估计(平均误差:2.1 毫米)、关节角度(平均误差:4.16°)和指尖位置(平均 3D 误差:4.02 毫米)的评估以及在各种应用中的整体手部姿势重建得到了证实。
所提出的手套能够充分利用人手的灵活性,并具有潜在的应用,包括但不限于拟人机械手或手术机器人的远程操作、虚拟和增强现实以及人体运动数据的收集。
本研究由首尔国立大学、延世大学与加州大学的团队合作完成,详细内容于7月11日报道在了《自然·通讯》杂志。
手套硬件设计
综合手部运动数据集的收集、建模和后处理
使用信号分布实时细化骨长度
实时估计关节角度
指尖位置估计
实时手部姿势重建
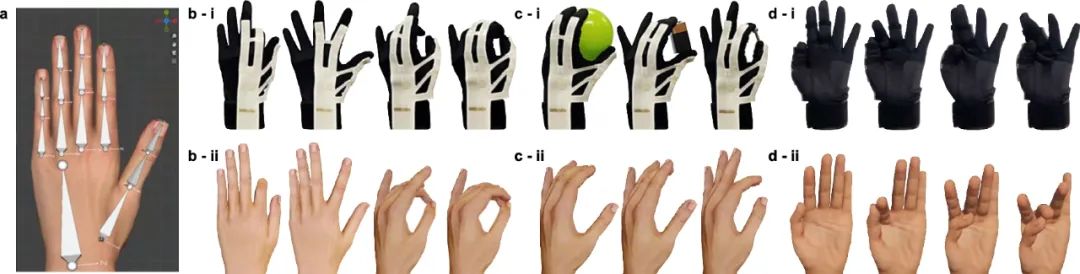
手部追踪系统的应用
结论
▼参考资料
Park, M., Park, T., Park, S. et al. Stretchable glove for accurate and robust hand pose reconstruction based on comprehensive motion data. Nat Commun 15, 5821 (2024). https://doi.org/10.1038/s41467-024-50101-w.
*本文仅分享医疗科技前沿进展,不代表平台利益。如涉及版权问题,请联系我们删除。
END
编译 | 刘帅
来源 | Nature Communications
审核 | 医工学人
扫码注册加入医工学人,进入综合及细分领域群聊,参与线上线下交流活动

*声明:医工学人为公益性非盈利组织,不收取任何注册费用,注册申请通过后将以邮件通知
点击关注医工学人



本篇文章来源于微信公众号: 医工学人
