




星标“医工学人”,第一时间获取医工交叉领域新闻动态~


7月5日,北京理工大学沈国震(Guozhen Shen)和La Li课题组,在《Nature Communications》上发布了一篇题为“Neuroprosthetic contact lens enabled sensorimotor system for point-of-care monitoring and feedback of intraocular pressure”的论文。论文内容如下:
一、摘要
二、背景介绍
面对上述挑战,作者通过材料工程、器件结构模拟、智能隐形眼镜制造、神经-运动反馈、系统集成和功能验证,提出了一种生物相容性好且性能稳定的神经假体隐形眼镜(NCL)。制造出的NCL能够将经过温度校正的眼内压(IOP)信息转换为电信号,然后将其传输到体感皮层,并引导运动皮层向坐骨神经发出指令,最终使腿部产生抽搐,形成一个从IOP信号生成到神经感知再到运动活动的闭环系统。神经假体隐形眼镜中的应变计和温度传感器采用Ti3C2Tx MXene材料制成,降低了制造复杂度并提高了与柔软半球形基底的兼容性。得益于引入蛇形电极设计,基于Ti3C2Tx MXene的应变传感器实现了高达12.52 mV mmHg^−1的高灵敏度和优异的稳定性(1小时后性能无显著下降),使得经过温度校正的电信号传输到神经中枢,并调节相应的运动活动,以预警眼压的升高或降低。
三、内容详解
欲了解详细制备过程,请阅读原文。
3.1 神经假肢隐形眼镜用于现场眼压监测和预警
此外,提出了一种形状自适应湿法转移策略。电极采用无掩膜激光直写技术进行图案化,避免了掩膜板对电极施加的压缩应力导致材料内微裂纹扩展,从而导致导电性下降,同时,电极结构的骨架化克服了二维基底上曲面的机械限制。然后,使用水溶膜剥离电极,并将其放置在用PDMS固化的角膜隐形眼镜模型正上方,反复冲洗以溶解膜并增强电极与PDMS之间的界面粘附。随后,由于水溶膜逐渐溶解,转移的电极被粘附到半球形基底上,这是由于基底和电极之间的结合能较强,这种形状自适应湿法转移策略避免了传统热压法中由于二维基底变形而导致的电极变形或断开。图1c展示了通过这种转移方法制备的全MXene基神经假体隐形眼镜,左侧照片展示了佩戴这种Ti3C2Tx-NCL的情景,并指示了其优异的生物相容性,右侧图像展示了该设备的美观性和优异的透明性。
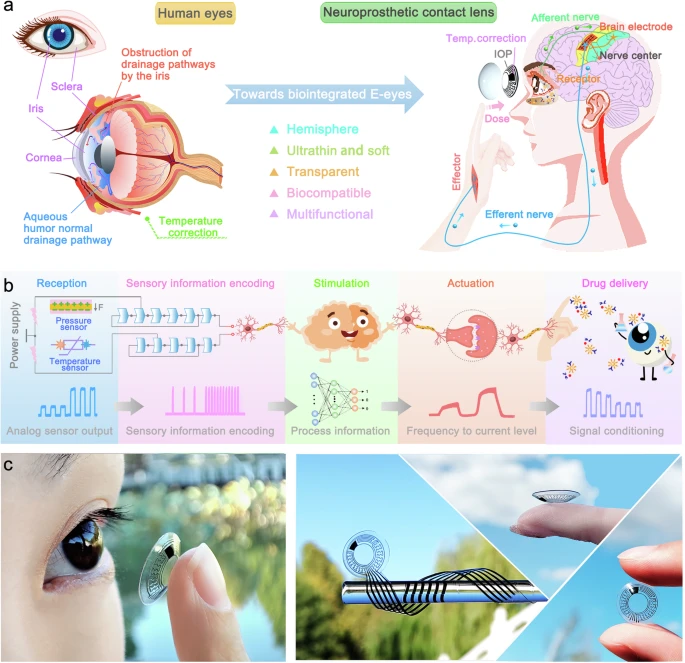
图1 神经假体隐形眼镜及其Ti3C2Tx软性隐形眼镜的数码照片。a 人类眼球和眼球结构的示意图,其中在眼压升高时变形最明显的结构(角膜、虹膜和巩膜)被标注出来。上半部分展示了虹膜阻塞排水通道的示意图,导致眼内压增加。相反,正常眼压下房水在前房中的流动则在图的下半部分展示。右侧是基于神经假体隐形眼镜的神经形态人工电路。b 广温范围内眼压监测反馈的方框图。c 具有压力检测和温度检测双重功能的Ti3C2Tx-SCL的照片。
3.2 材料工程与结构设计
为了提高眼压传感器的灵敏度,设计了一种基于Wheatstone桥电路和应力集中的压力传感器。图2c中显示的仿真结果表明,随着眼压的增加,变形主要发生在角膜巩膜交界处,这主要是由于杨氏模量的差异引起的。随着眼压的增加,角膜变形会变得更大,这可以通过Ti3C2Tx-SCL和角膜的共形变形来检测到。此外,随着眼压的增加,角膜变形是不均匀的,从角膜中心最大达到5毫米,径向逐渐减小(图2b),而环向的变形大于径向的变形(图2d)。根据以上仿真结果,Wheatstone桥的应变臂和参考臂分别设计在周向和径向位置,同时巧妙地避免了遮挡视野范围(图2f)。 为了进一步提高眼压传感器的灵敏度,应变片被设计成直线形以放大变形期间的电阻变化,而参考片被设计成蛇形以减小变形期间的电阻变化。仿真结果和测试结果进一步验证,直线电极的电阻变化远大于在相同拉伸应变条件下蛇形电极的电阻变化(图2g,h)。结合以上材料选择和结构优化设计,基于MXene的眼压传感器具有宽泛的检测范围和高灵敏度,是目前报道的眼压传感器中灵敏度最高的(图2i,j)。相比与金属电极之下,石墨烯和MXene等二维材料具有高比表面积和层间范德华力,这可能导致滑移并产生良好的延展性和高检测灵敏度。
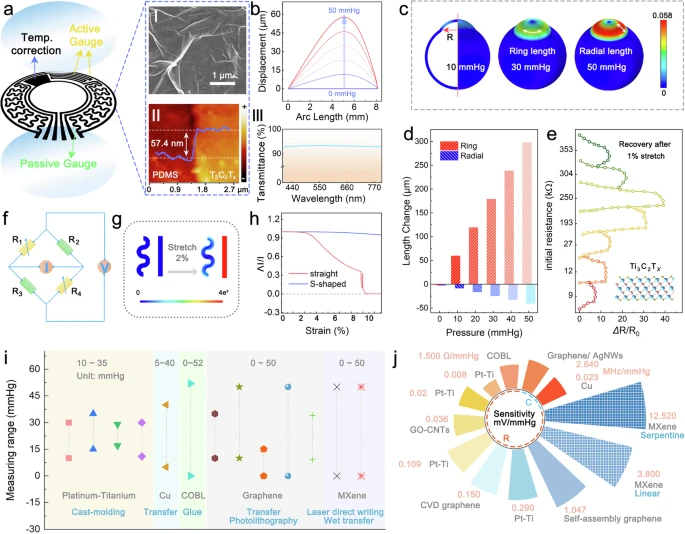
图2 用于眼压监测的Ti3C2Tx-SCL的构造和结构设计。a Ti3C2Tx-SCL的结构。面板1显示了Ti3C2Tx MXene电极功能材料的SEM图像。面板II显示了功能电极层的厚度,该厚度是通过原子力显微镜测量得出的。面板III突出显示了Ti3C2Tx-SCL观察区域的高透明度。b 角膜基弧与轴向变形距离(R)与眼压之间的关系。c 不同眼压(10、30和50mmHg)下眼球表面应力分布,其中角膜位于上半部分,巩膜位于下半部分。角膜的周向和径向方向都有清晰的标记。d 角膜基弧在环向和径向方向上与眼压的关系。e 电极厚度对1%应变恢复灵敏度的影响。插图展示了Ti3C2Tx MXene的结构,其中蓝色表示钛原子,粉色表示碳原子,黄色表示表面功能基团。f 一个Wheatstone桥电路的示意图,其中R1和R4代表主动应变片,R2和R3代表被动应变片。g 直线和蛇形电极在原始状态和2%应变下的有限元分析。h 蛇形和直线电极的电流变化与拉伸应变的关系。比较先前报道的角膜隐形眼镜眼压传感器与作者的工作在测量范围(i)和灵敏度(j)方面的差异,其中Pt-Ti、GO-CNTs和COBL分别定义为铂-钛、还原石墨烯氧化物和碳纳米管以及导电全有机双层薄膜。
3.3 Ti3C2Tx-SCL的性能评估
为评估Ti3C2Tx-SCL的生物相容性,使用类似视网膜新生血管内皮细胞并具有无限传代能力的人类脐静脉内皮细胞(HUVECs)进行了为期7天的体外细胞毒性试验。图3g、h显示细胞在Ti3C2TxSCL上均匀分布,其数量随着增殖速率在第7天达到309%,活细胞数量显著多于死细胞,存活率在一周内超过94%,符合细胞培养的要求。
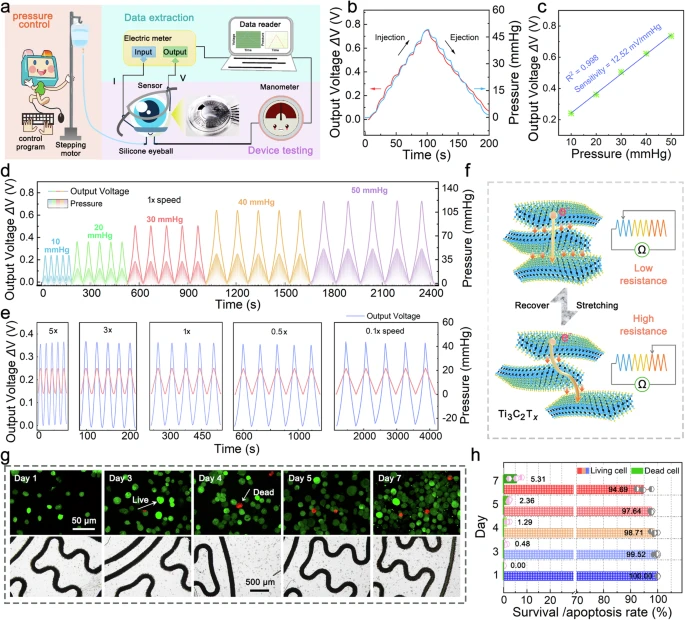
图3 Ti3C2TxSCL的性能分析和生物相容性测量。a 模拟眼压测试平台的示意图,包括三个模块:压力控制、设备测试和数据提取。插图是仿生眼球的照片。b Ti3C2Tx-SCL在1倍速下对6.25 mmHg压力变化的静态响应。c 输出电压变化与压力之间的拟合关系,每个点是在相应压力下进行5个周期的平均值。d 在不同压力幅度(0-10, 0-20, 0-30, 0-40, 0-50 mmHg)下1倍速的输出电压变化曲线。e 在0-20 mmHg范围内,5x, 3x, 1x, 0.5x和0.1x速度下的输出电压变化曲线。f 初始状态和受拉伸应力时Ti3C2Tx MXene纳米片的显微结构示意图,以及电子传输通道的变化,其中蓝色表示钛原子,黑色表示碳原子,黄色表示表面功能基团。g 细胞毒性测试在第1、3、4、5和7天的荧光和光学照片,以及(h)存活率和凋亡率统计。
3.4 从-20°C到40°C范围内的温度校正
因此,制备了基于Ti3C2Tx MXene的温度传感器,具有高灵敏度(TCR = −0.996%)和良好的线性(R2 = 0.99877),可在−20至20°C的温度范围内实时监测环境温度,如图4c所示。 Ti3C2Tx MXene具有丰富的表面基团(-O、-OH和-F),表现出窄带隙半导体特性和纳米片之间的接触电阻,升高的温度促进了电子隧穿效应,提高了电子传输效率并增加了载流子浓度(图4b)。图4e中在−5°C和5°C的循环测试说明了传感器在不同温度下的准确性和耐用性,分别仅在−5°C和5°C时的响应变化为0.367%和0.797%。图4d显示Ti3C2Tx-SCL能够清楚地区分不同温度下的眼压变化,但在低温下测试的相同眼压的输出电压变化显著高于在高温环境中测试的结果。如图4f所示,对Ti3C2Tx-SCL进行了0-50 mmHg范围内的循环测试,在-20°C和40°C时的灵敏度分别为环境温度(25°C)的206.7%和88.4%,灵敏度与温度之间存在良好的线性关系。因此,基于上述测试结果,Ti3C2Tx-SCL的温度补偿方法在图4g中指定。在室温环境下,Ti3C2Tx-SCL在压力和零压状态之间的输出电压差直接对应于IOP的值。在可变温度环境下,相同IOP波动下的输出电压差与室温下的输出电压差不同,此时,外部电路根据温度传感器测量的环境温度调整输出电压,以获取准确的IOP值。
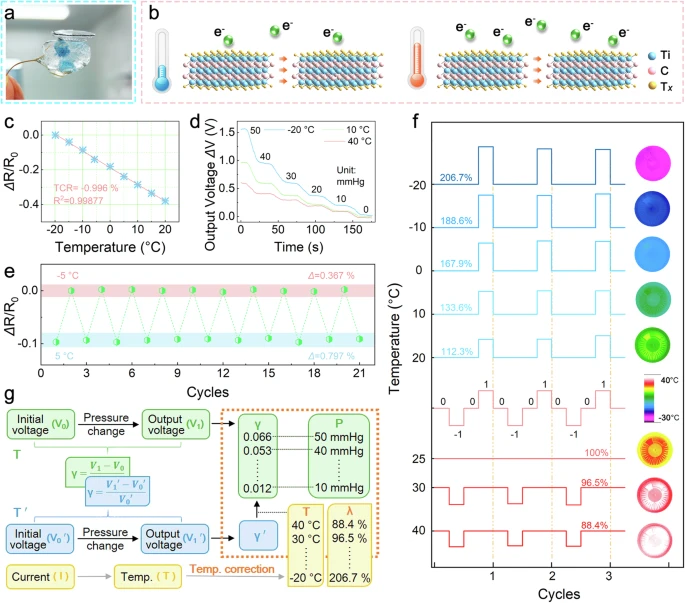
图4 Ti3C2Tx MXene温度传感器的性能表征及Ti3C2Tx-SCL的温度校正。a. 冰花上的Ti3C2Tx-SCL照片,展示其在低温下使用的稳定性。b. 基于Ti3C2Tx MXene的电极的温度传感机制。c. 温度传感器的静态测试和拟合结果。d. 不同温度下的IOP(眼内压)梯度测试。e. 在-5°C和5°C的循环测试。f. Ti3C2Tx-SCL在IOP范围0-50 mmHg内的灵敏度变化率。插图显示了Ti3C2Tx-SCL在不同温度下的热像(视频2)。g. IOP监测系统中的温度补偿流程图。
视频2
3.5 神经形态感觉运动回路的演示
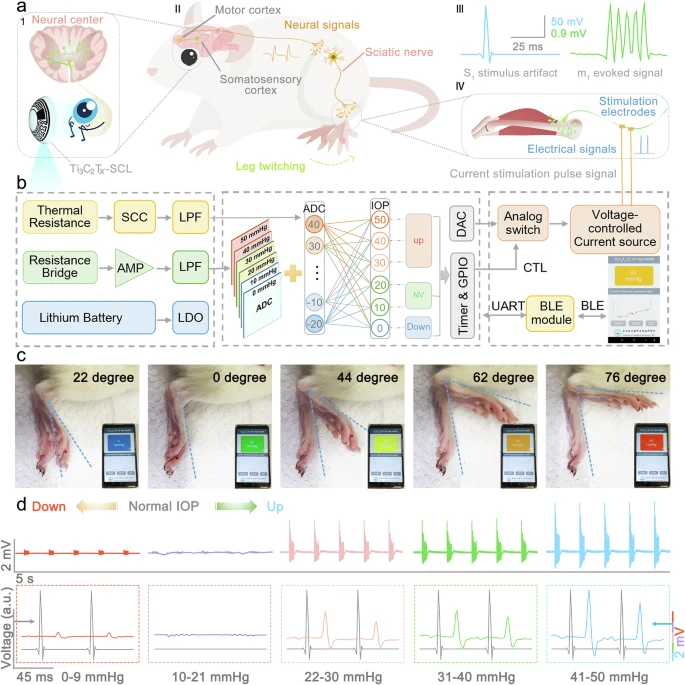
图5 用于眼压感知-运动反馈回路的神经形态CL。a 眼压感知和反馈的神经回路的示意图。面板1描绘了一种神经假体隐形眼镜,可向大脑提供感觉反馈。面板II是用于感知眼压的神经反射回路的示意图。面板III记录了在大鼠异常眼内压时刺激信号到体感皮层和在运动皮层中收集的相应电位信号。面板IV显示了用于诱导腓肠肌收缩的坐骨神经刺激的示意图。b 压力和温度信号处理步骤的系统块图,包括信号采集、处理、控制、通信和显示。c 活体大鼠模型中腿部抽搐反应的照片和在各种模拟眼压水平下刺激的实时眼压显示(从左到右,图像显示范围为0-9 mmHg的低眼压、10-21 mmHg的正常眼压,以及分别为22-30、31-40和41-50 mmHg的高眼压)。d 活体大鼠模型中在各种眼压水平下刺激时腓肠肌中获取的信号(灰色曲线显示了NCL的刺激信号)。
四、全文总结
五、文献信息
Liu, W., Du, Z., Duan, Z. et al. Neuroprosthetic contact lens enabled sensorimotor system for point-of-care monitoring and feedback of intraocular pressure. Nat Commun 15, 5635 (2024). https://doi.org/10.1038/s41467-024-49907-5
扫码注册加入医工学人,进入综合及细分领域群聊,参与线上线下交流活动

*声明:医工学人为公益性非盈利组织,不收取任何注册费用,注册申请通过后将以邮件通知
推荐阅读
点击关注医工学人



本篇文章来源于微信公众号: 医工学人
