




星标“医工学人”,第一时间获取医工交叉领域新闻动态~

前言
/
关键要点
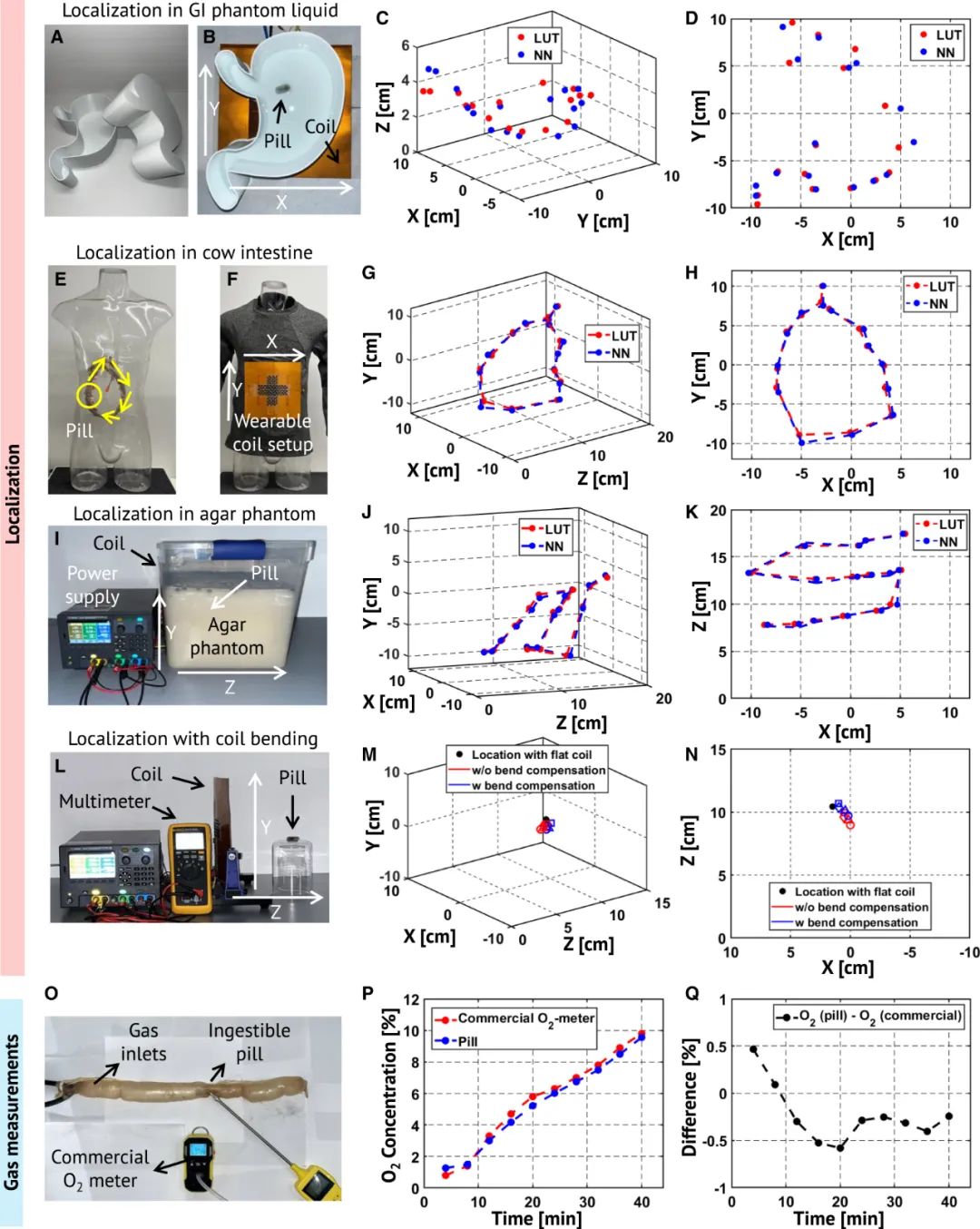
胃肠道 (GI) 中的气体测量有助于诊断和持续监测肠易激综合征、炎症性肠病和食物不耐症等疾病。测量和定位这些气体的传统方法通常是侵入性的,通常需要在医院进行。
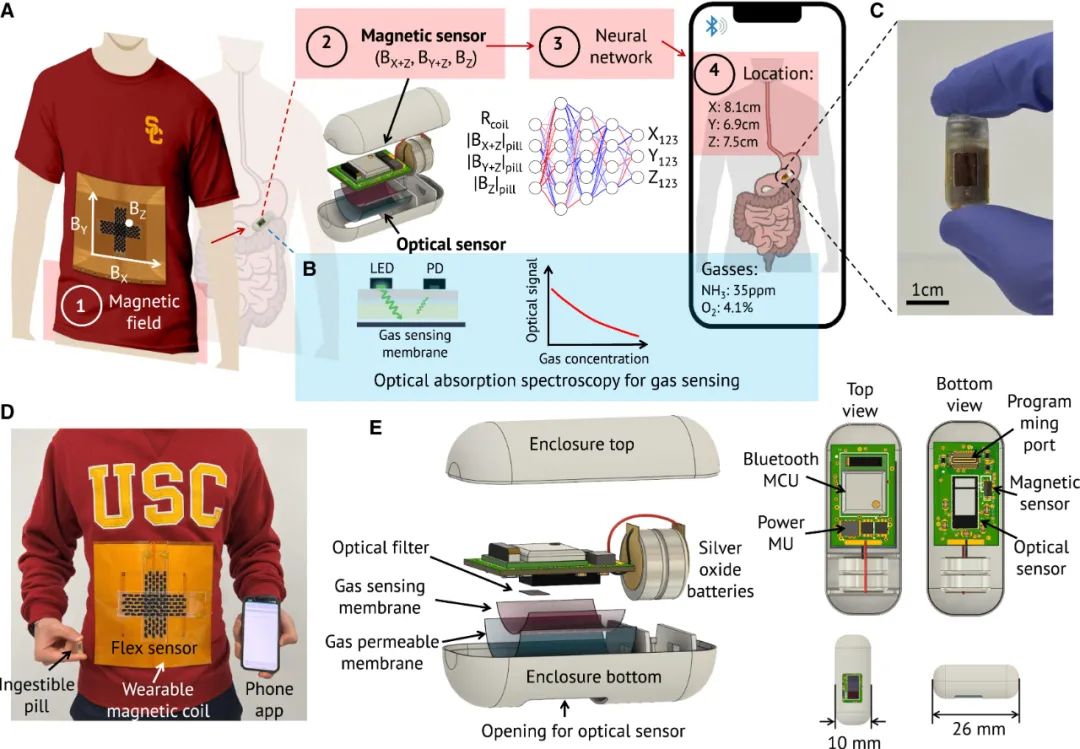
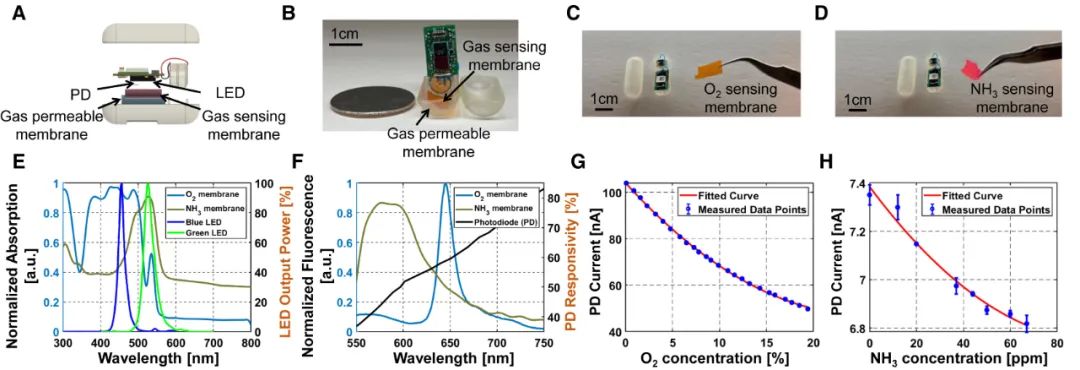
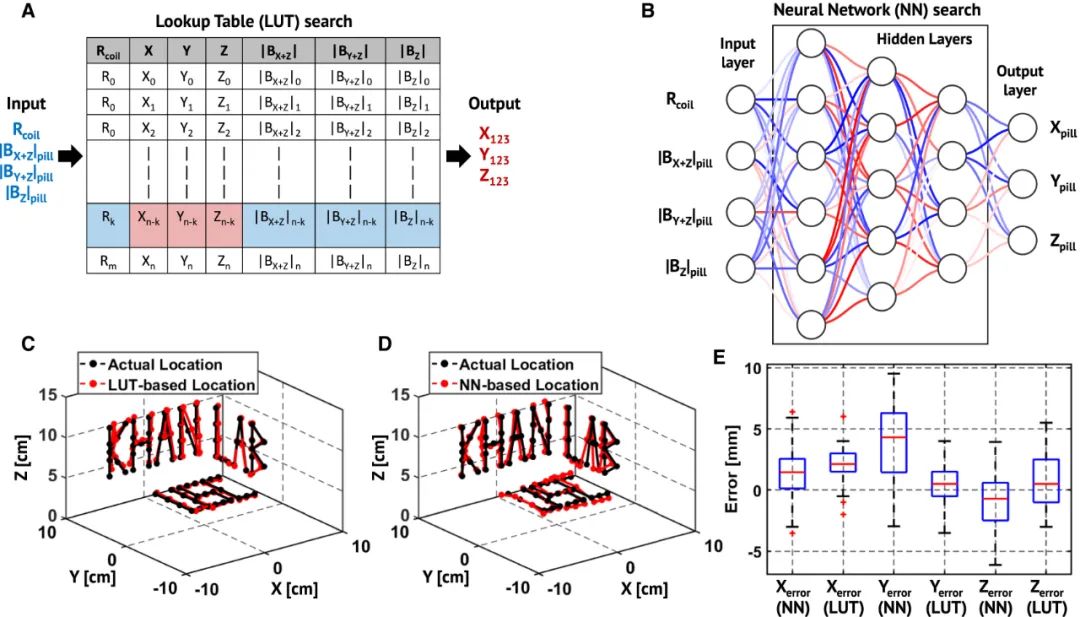
可摄入电子设备提供了更方便的解决方案,但定位这些设备仍然具有挑战性。作者介绍了一个可穿戴平台,该平台实现了基于磁场的可摄入物 3D 定位,分辨率达到毫米级:查表法的精度小于2.2 毫米,基于神经网络的算法小于4.2毫米。可吞服药丸配备光电气体传感器,可检测0~20% 的氧气(O2)和0~100ppm浓度范围内的氨 (NH3)。NH3测量值可作为识别幽门螺杆菌的替代指标,幽门螺杆菌是一种与消化性溃疡、胃炎和胃癌有关的细菌。
这项工作旨在让患者能够在家中舒适地方便地评估他们的胃肠道气体状况并管理消化健康。详细工作于6月12日报道在了《细胞·物质科学》杂志。
3D气体定位可吞服药丸的系统级概览
光电传感器和气体膜的表征
可穿戴定位线圈和弯曲传感器
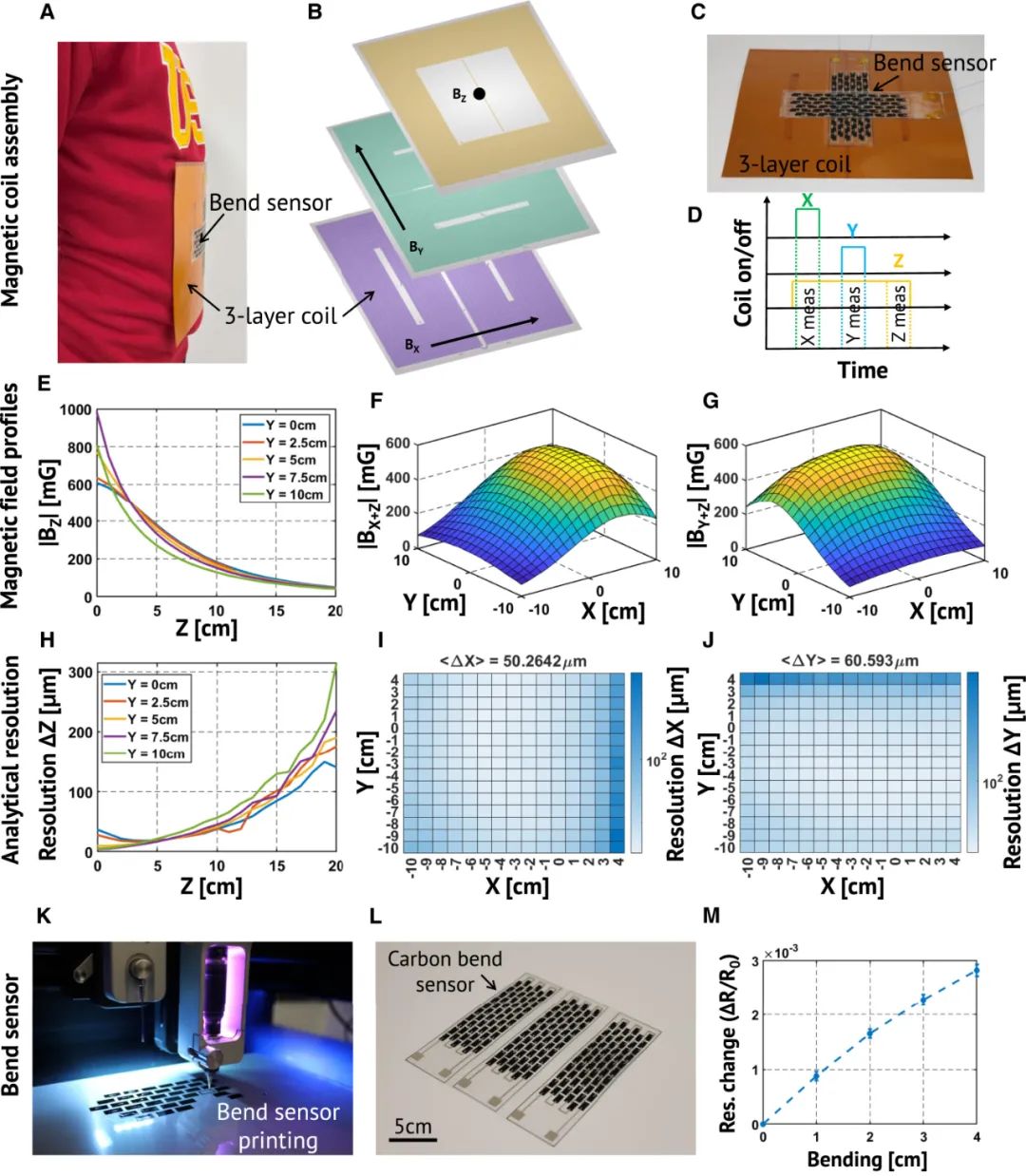
3D定位算法和测量分辨率
3D 定位和气体测量
结论
▼参考资料
3D gas mapping in the gut with AI-enabled ingestible and wearable electronics, Cell Reports Physical Science (2024). DOI: 10.1016/j.xcrp.2024.101990.
*本文仅分享医疗科技前沿进展,不代表平台利益。如涉及版权问题,请联系我们删除。
END
编译 | 刘帅
来源 | Cell Reports Physical Science
审核 | 医工学人
关注“医工交叉前沿技术”,可进入医工学人交流群

群主微信(申请时请备注个人信息)
点击关注医工学人



本篇文章来源于微信公众号: 医工学人
