




星标“医工学人”,第一时间获取医工交叉领域新闻动态~

前言
/

动态变化的环境驱使生物体向着运动和感觉功能不可分割的整合方向进化。特别是脊椎动物的骨骼肌和感觉皮肤之间的连贯整合,使它们能够由神经系统协调合理、有序的合作,从而智能地执行感知动作。嵌入在柔软皮肤中的多种受体(机械、热、疼痛等)收集和编码触觉数据,这些数据不仅可以引导肌肉运动达到最佳状态,还可以解读环境以增强意识和认知。在生物系统中建立的这种运动-传感器集成启发了智能机器人系统的开发,该系统模仿皮肤柔软度,以安全地探索和与动态、非结构化且通常不确定的环境交互,特别是当机器人与生物组织和器官交互以实现精准治疗时。然而,现有的机器人往往缺乏执行器、传感器和控制器之间的无缝集成,无法自然地保持物理柔软度和生物相容性。
受脊椎动物骨骼肌和感觉皮肤的紧密结合启发,文章提出了一种软体机器人的设计策略,主要由电子皮肤 (e-skin) 和人造肌肉组成。这些机器人使用基于原位溶液的方法将多功能传感和按需驱动集成到生物相容性平台中。它们采用仿生设计,可实现自适应运动和与组织的无压力接触,并由无电池无线模块支持,以实现不受束缚的操作。演示范围从用于检测血压的机器人袖带,到用于跟踪膀胱容量的机器人夹持器,用于 pH 值传感和现场药物输送的可摄取机器人,以及用于量化心脏功能和提供电疗的机器人贴片,突出了生物启发式软机器人的应用多功能性和潜力。该设计建立了一种通用策略,采用广泛的传感和响应材料,形成用于医疗技术及其他领域的集成软机器人。
详细工作于6月5日报道在了《自然·通讯》杂志,论文完成单位为北卡罗来纳大学应用物理科学系。
基于生物启发的植入式微创智能传感机器人用于诊断、治疗和药物输送
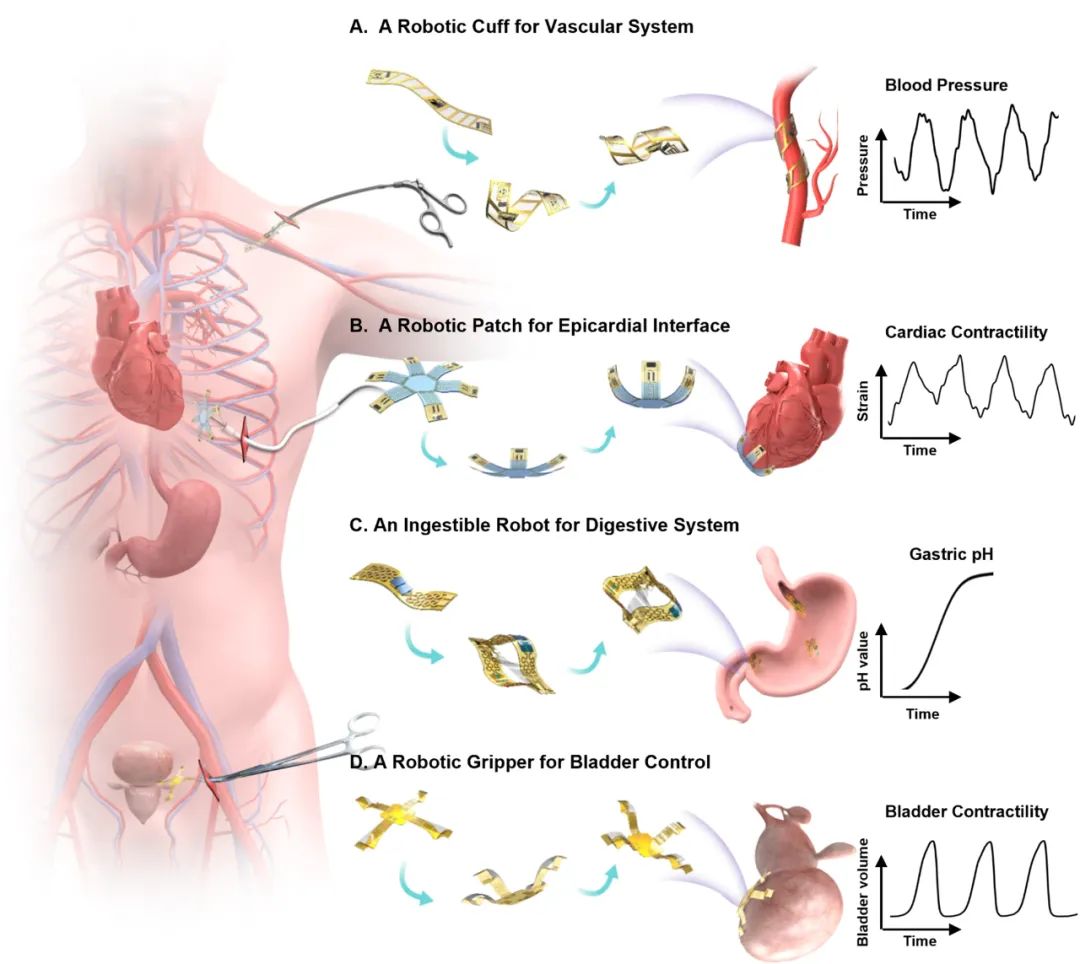
a. 用于血管系统的机器人袖带。扭转运动可在血管周围提供物理包围,以精确检测血压和结构支撑。
b. 用于心外膜接口的机器人贴片。抓握运动可与跳动的心脏轻柔接触,不会产生残余压力,从而提供心脏收缩力和温度的实时量化以及电疗。
c. 用于消化系统的可摄入机器人。从微型药丸形状到 3D 扩展环的结构转变使其能够延长在胃内的停留时间,以提供 pH 值感测和药物输送。
d. 用于膀胱控制的机器人夹持器。抓握膀胱的自适应运动可精确跟踪膀胱容量并进行有针对性的刺激以治疗泌尿系统疾病。
多模式传感软机器人的多材料集成
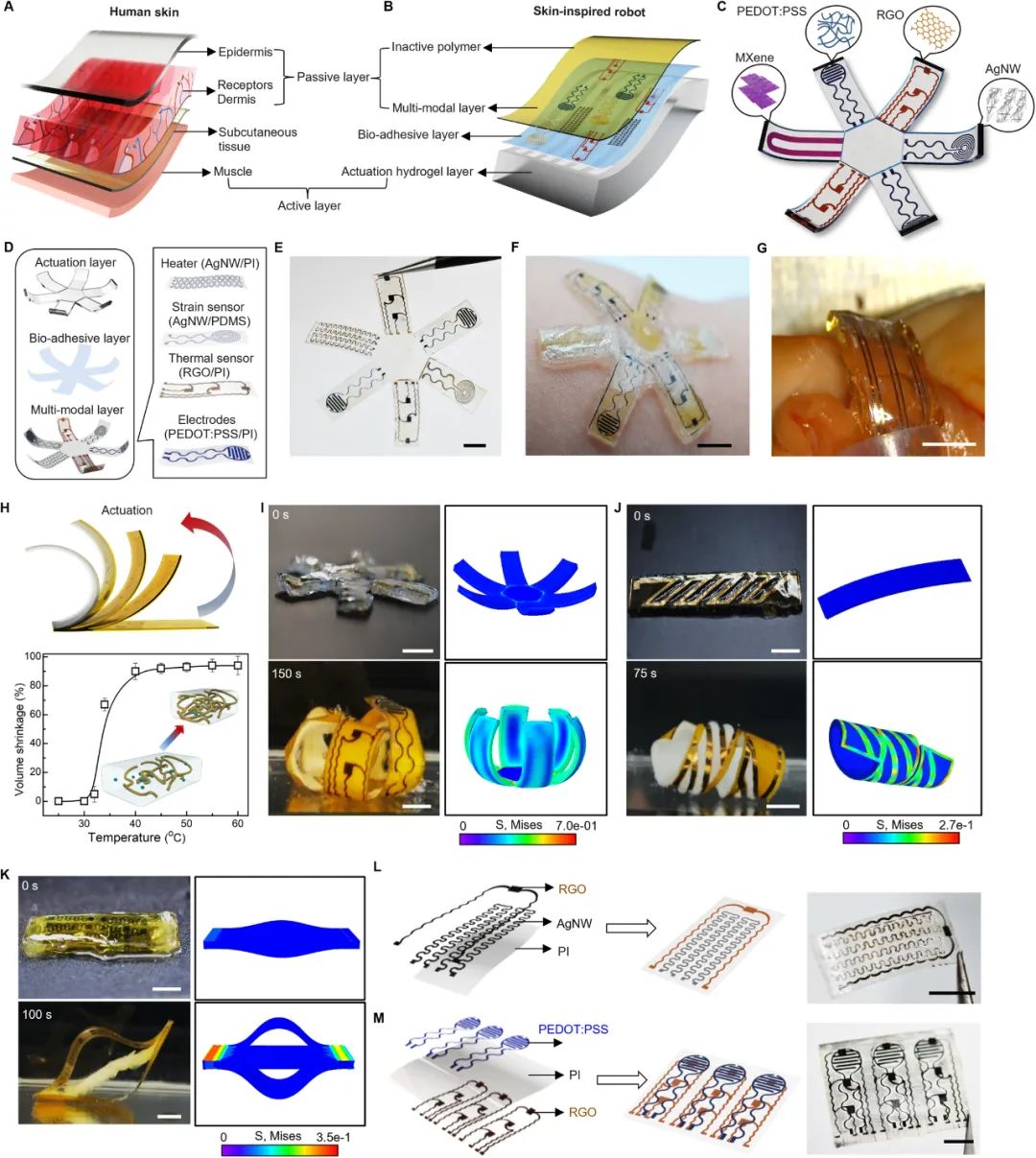
a. 皮肤的表皮-真皮-肌肉结构示意图。
b. 受皮肤启发的软体机器人结构。
c. 集成多模态传感软体机器人的概念图,每条手臂都具有不同的纳米复合传感器。
d. 受海星启发的多模态传感软体机器人的示意图。左图:突出显示 3 个主要组成层的分解视图,包括柔性多模态层、生物粘附层和驱动水凝胶层。右图:突出显示多模态层内多材料集成的示意图,包括:(i) 银纳米线 (AgNWs) 和聚酰亚胺 (PI) 作为柔性加热器;(ii) AgNWs 和 PDMS 作为应变传感器;(iii) 还原氧化石墨烯 (RGO) 和 PI 作为温度传感器;(iv) 聚(3,4-乙烯二氧噻吩)聚苯乙烯磺酸盐 (PEDOT:PSS) 和 PI 作为传感和刺激电极。
e. 带有六个纳米复合传感器的柔性电子皮肤的光学图像。光学图像显示软传感机器人以高机械柔顺性保形附着在人体皮肤(f)和猪组织(g)上。
h. 顶部:示意图显示聚(N-异丙基丙烯酰胺)(PNIPAM)和聚酰亚胺基纳米复合材料的双层的温度响应弯曲。底部:PNIPAM 在 25-60°C 温度范围内的体积收缩。数据点表示来自n=3个独立实验的平均值,误差线以 SDI-K表示。软机器人热触发结构重构的光学图像和相应的有限元建模。颜色表示 von Mises 应力大小。
i. 仿生软夹持器在 40°C 下加热时封闭。
j. 受手性种荚启发的机器人在 40°C 下反转螺旋。
k. 软机器人药丸在 40°C 下加热时膨胀。
l~m. 使用原位溶液法将各种功能材料各向异性集成到聚合物基质中以形成多模态传感系统的示意图和光学图像。l: 在同一聚酰亚胺侧上的基于RGO /PI 的温度传感器和基于 AgNW/PI 的加热器。m: 分别集成在 PI 层的两个相对侧上的基于PEDOT :PSS/PI 的电极和 RGO/PI 温度传感器。比例尺,5 毫米。
各向异性集成纳米复合材料实现按需驱动机器人
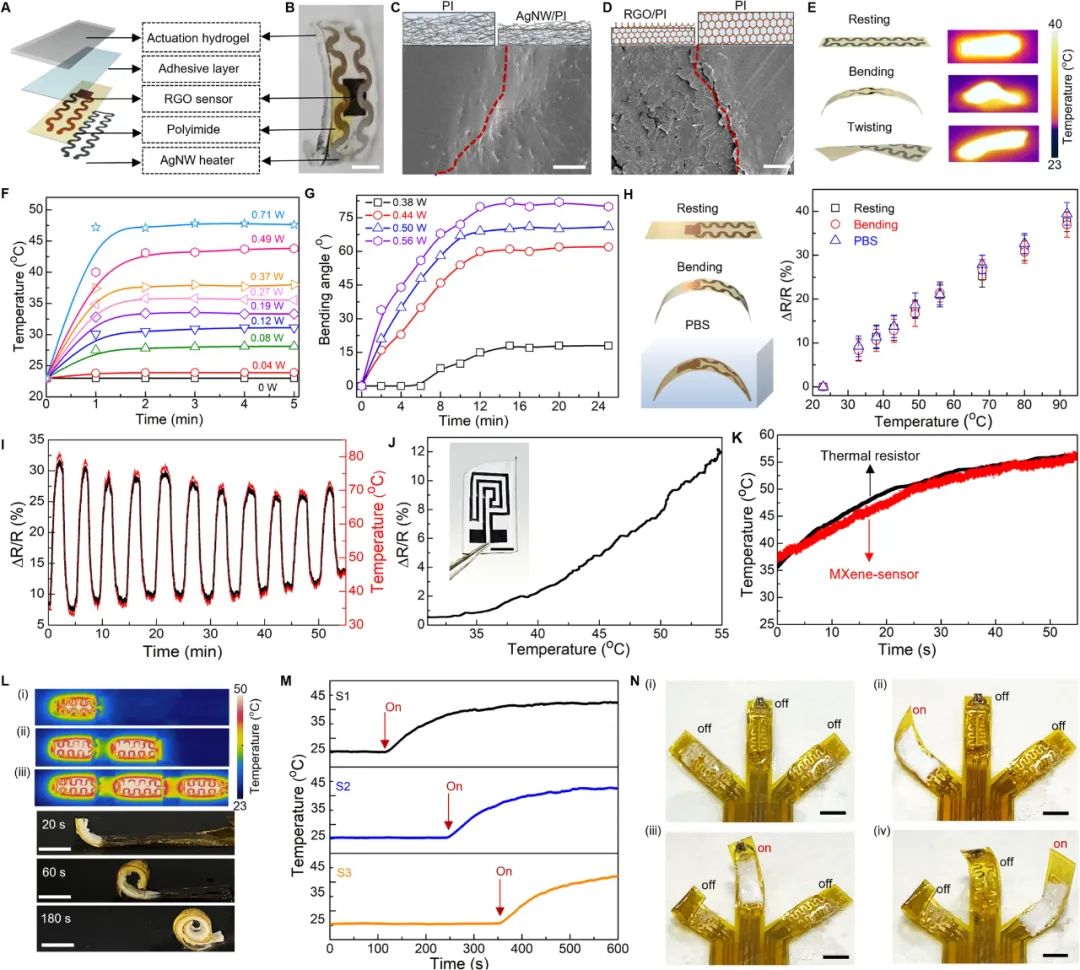
a~b:软机械臂的分解图 (a) 和光学图像 (b) 说明,该软机械臂由 PNIPAM 水凝胶层、RGO/PI 热传感器和 AgNW/PI 驱动加热器组成,使用正丁基氰基丙烯酸酯粘合剂粘合。AgNW/PI 加热器产生的焦耳加热触发机械臂弯曲。比例尺,5毫米。
c~d. 纳米复合薄膜表面的 SEM 图像。此处,部分区域的深反应离子蚀刻 (DRIE) 揭示了薄膜内的各向异性整合,区分原始 PI 与 AgNW/PI (c) 和 RGO/PI 区域 (d)。AgNW 和 RGO 具有比 PI 更高的表面自由能,均匀分散在 PI 基质内,增强了润湿和结合性能。比例尺,(c) 1.5 μm,(d) 10 μm。
e. AgNW/PI 加热器的红外热成像图,即使经过 1000 次弯曲和扭曲循环后,仍能保持一致的加热性能。
f. 该加热器的表面温度随输入电功率而变化,在低功率下也能高效运行。
g. 软体机械臂的弯曲角度随输入电功率的变化而变化。
h. RGO /PI 热传感器在弯曲、扭曲和 PBS 浸没过程中的电阻响应,温度范围为 23 °C 至 92 °C。数据点表示来自 n = 3 个独立实验的平均值,误差 线以 SD表示。
i. RGO/PI 热传感器的静态循环测试。此处,左侧 y 轴表示电阻变化,而右侧 y 轴显示相应的温度变化。
j. 基于MXene 的热传感器在 23 °C 至 55 °C 温度下的电阻响应。
k. MXene /PI 热传感器与商用热电阻 (ERT-J0ET102H) 之间的温度测量比较。
l. 通过连续热刺激对软体机器人探头进行逐步卷绕驱动。顶部显示红外热成像图,底部显示从平坦状态到卷曲状态的结构变化。比例尺,10 毫米。
m. 集成的 RGO/PI 热传感器能够测量本体感受的局部区域的温度。
n. 光学图像展示了通过顺序编程输入功率对三臂软机器人夹持器进行按需运动控制。比例尺,5 毫米。重复 3 次测量,结果与(c)、(d)、(i)、(j)、(k)、(l)相似。
用于无线感知和驱动的软体传感机器人的设计和构造
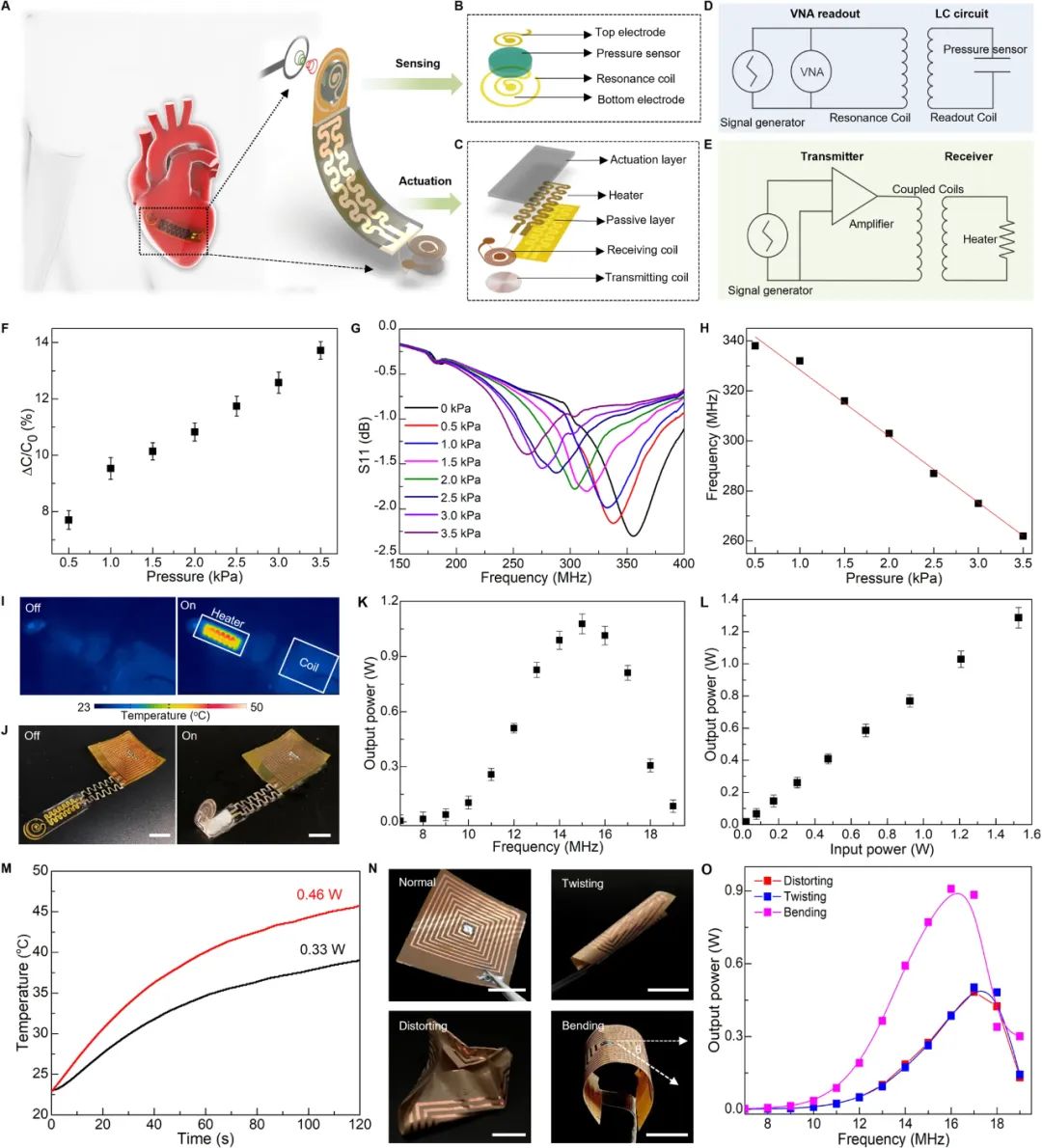
a. 软传感机器人示意图,该机器人具有电加热器、基于聚丙烯酰胺 (PAAm) 的压力传感器和两个用于传输传感信号 (b) 和电力 (c) 的感应线圈。
b. 传感组件的分解图,其中包含带有两个电极的电容器、PAAm-水凝胶介电层和铜 (Cu) 感应通信线圈。
c. 驱动组件的分解图,包括 PNIPAM 驱动水凝胶、柔性电加热器和基于铜线圈的射频 (RF) 能量收集器。
d. 无线压力传感的等效电路图,其中压力变化会改变电容,从而改变谐振频率,该谐振频率通过矢量网络分析仪 (VNA) 无线捕获。
e. 无线驱动的等效电路图,其中连接到 RF 功率放大器的发射线圈为接收线圈通电,为加热器供电以实现机器人运动。
f. 测量基于 PAAm 的压力传感器响应施加的压力而发生的电容变化。
g. 测量了 PAAm 基压力传感器响应施加压力时谐振曲线的偏移。
h. LC谐振频率随施加压力的变化,作为无线压力检测的信号转导方案。
i. 无线收集能量期间的热分布表明接收线圈中的加热最小,电加热器消耗的功率有效,确保对周围生物环境的热损害最小。
j. 软传感机器人在无线驱动下从平坦状态变为弯曲状态的光学图像。
k. 输出功率与频率的关系,在 ~15 MHz 处优化。
l. 输出电功率随输入功率而变化。
m. 在用于无线驱动的各种输出功率下,电加热器随时间的温度变化。
n. 变形 RF 线圈的光学图像,包括弯曲、扭曲和扭曲。
o. 在不同形状变形下测量的 RF 线圈的谐振频率。此处的弯曲角度θ为60。比例尺,5 毫米。数据 (f)、(k)、(l) 来自n = 3 个独立实验,误差线以 SD 表示。
与各种内脏器官交互的软体传感机器人
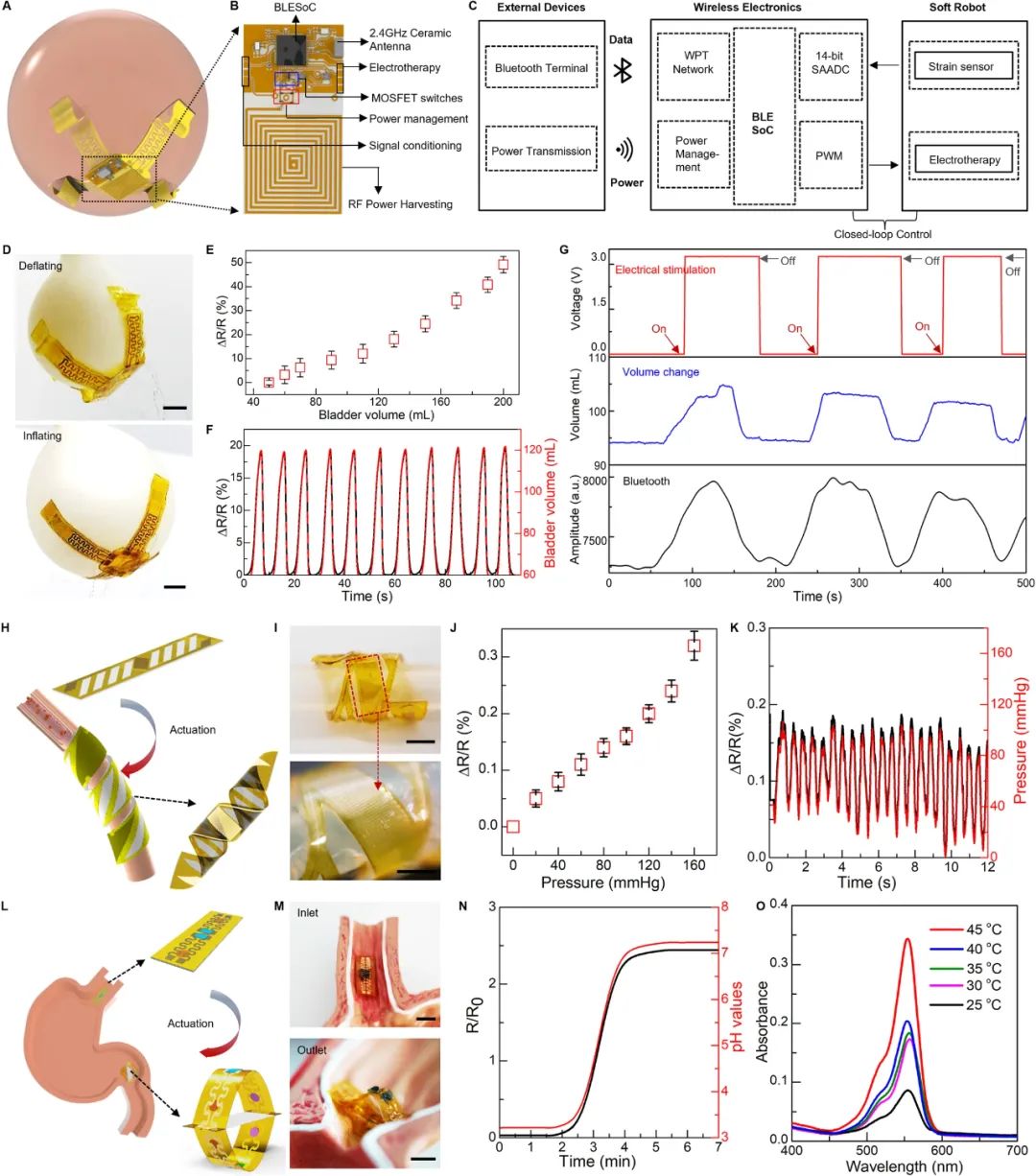
a. 完全可植入的软机器人夹持器可精确测量膀胱容量并通过无线闭环控制提供电刺激。
b. 控制平台包括无线能量收集网络、全桥放大器、稳压器和集成蓝牙片上系统和 MOSFET 开关的信号调节电路。
c. 膀胱刺激模块的框图。
d. 部署到人工膀胱上的软机器人夹持器可演示放气和充气循环。
e. 测量的人工膀胱上弯曲应变传感器的电阻特性与体积变化相关。
f. 3D 弯曲应变传感器监测周期性膀胱操作期间的实时体积变化,并在双轴上显示电阻和体积变化。
g. 编程电刺激(顶部)和测量的人工膀胱体积(中间和底部)。此演示使用 ~100 mL 的体积阈值和 3 V 的幅度进行。停用过程的轻微延迟可归因于微控制器单元的响应时间。
h. 环绕血管的软机器人袖带用于监测血压。
i. 袖带在刺激血液循环的人造血管上的光学图像。
j. 在不同模拟血压下测量应变传感器的电阻变化。
k. 使用软机器人袖带测量人造动脉系统中的流体压力,左侧 y 轴显示电阻变化,右侧 y 轴显示压力变化。
l. 可摄取的软机器人,设计用于连续监测胃 pH 值和延长药物输送时间。
m. 光学图像显示机器人进入、扩张和阻塞胃部。
n. PEDOT:PSS/PVA 水凝胶对 pH 值随时间变化(范围从 3 到 7)的电响应,左侧 y 轴显示电阻,右侧 y 轴显示 pH 值变化。
o. 罗丹明-B 嵌入聚乳酸-乙醇酸共聚物 (PLGA) 基质中,形成隐藏在机器人内部的药物输送贴片。其释放通过在不同温度下一小时内的紫外可见光吸光度来测量。比例尺,5 毫米。数据 (e)、(j) 来自n=3个独立实验,误差线以SD表示。
用于心外膜感知和电刺激的软机器人治疗夹的体内验证
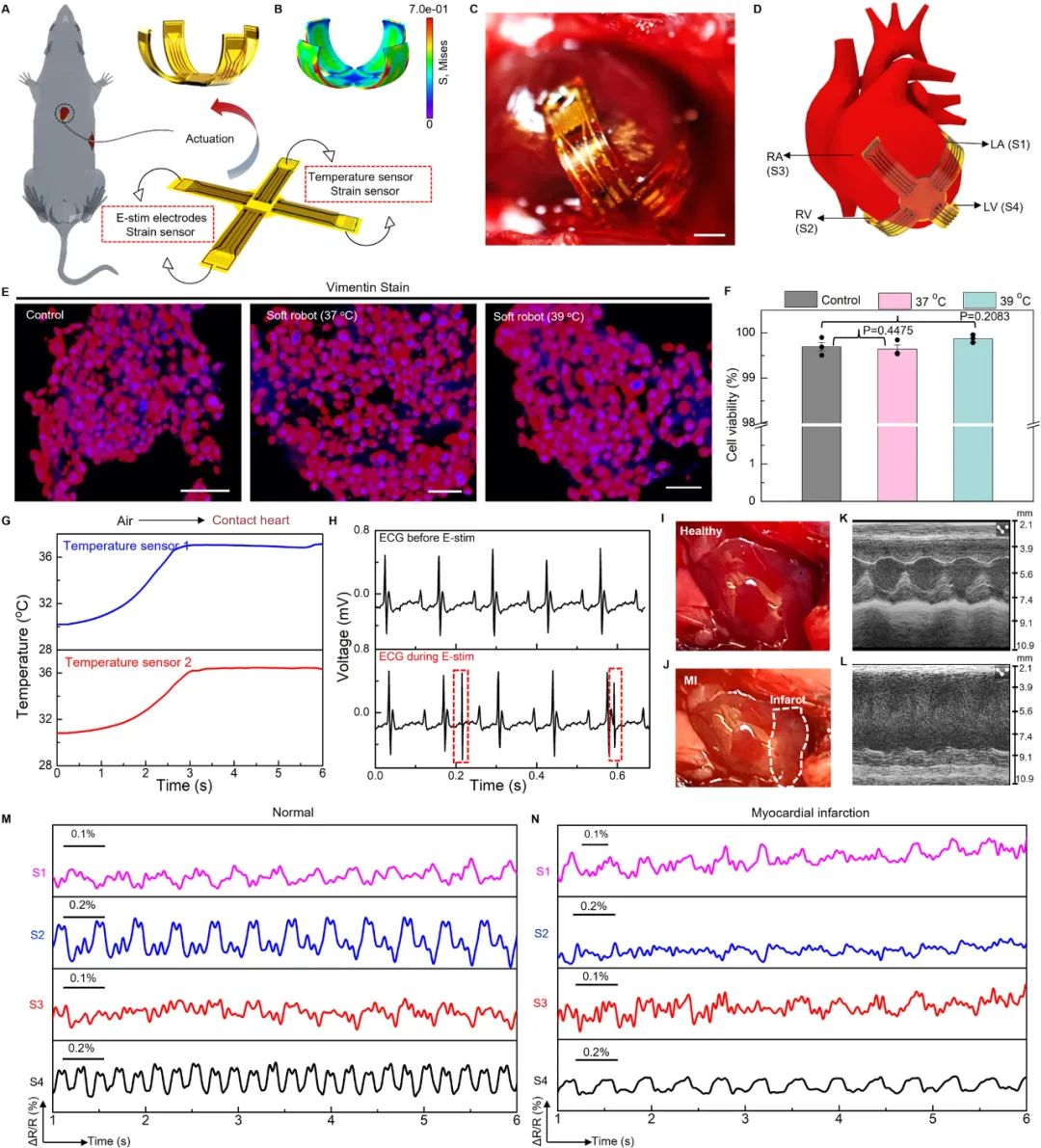
a. 示意图显示,在静止状态下,thera-gripper 的插入方式为微创,在启动状态下,则包裹在跳动的心脏表面。thera-gripper 包含四个由蛇形 Au/PI 电阻制成的应变传感器、两个基于 Au 的 E-stim 电极,以及两个由热电阻制成的温度传感器。
b. 启动状态的有限元建模。图例中的颜色表示 von Mises 应力的大小。
c. 软机器人 thera-gripper 抓取活体小鼠心脏心外膜表面的图像。比例尺,5 毫米。
d. 示意图显示 thera-gripper 在小鼠心脏上的位置,其中应变传感器(标记为 S1、S2、S3 和 S4)位于不同的心腔上,用于局部监测功能障碍组织。
e. 3T3-J-2 细胞在暴露于集成有电子皮肤层和 PNIPAM 水凝胶肌肉层的软机器人之前(对照)和之后的共聚焦显微镜图像,在 37 °C 和 39 °C 下孵育 48 小时。比例尺,50 μm。
f. 软机器人暴露前后的细胞活力比较,表明暴露于软机器人并在高温(39 °C)下培养的 3T3-J-2 细胞活力没有下降。比例尺,50 μm。n = 3。P值由非配对t检验得出。
g. 将治疗夹部署到小鼠心脏上时进行的温度测量证明了该设备实时监测热变化的能力。
h. 使用一对 Au E-stim 电极进行电刺激期间的表面 ECG 轨迹。心肌梗死 (MI) 两周后健康心脏 (i) 和受伤心脏(j)的光学图像。MI 区域在(j)中以白色虚线圆圈表示。健康心脏 (k) 和 MI 后心脏 (l)的 M 型超声心动图图像。使用软机器人治疗夹包裹在活体小鼠心脏上,对 MI前 (m) 和 MI 后 (n)局部心脏收缩的代表性测量。
结论
在本研究中,作者报道了软体机器人的概念和设备设计方案,这些软机器人高度模拟生物系统并无缝集成了执行器、传感器和刺激器,以实现结构适应及可重构接口,从而最大限度地减少体内组织损伤,增强生物-非生物界面的机械匹配,提高生物相容性,并以高时空精度来提高多模态性能。
软机器人主要由多模态纳米复合材料制成的电子皮肤层组成,该层模仿生物皮肤中的受体以感知各种外部刺激,以及由热响应 PNIPAM 水凝胶制成的人造肌肉层以产生自适应运动。采用基于原位溶液的方法来制造灵活的多模态电子皮肤。这种简便的方法代表了一个多功能平台,可将多种功能材料掺入聚合物基质中,形成具有高时空分辨率的各种类型的传感器。这种软机器人的仿生设计提供了机械运动的多功能性,包括弯曲、扭曲和扩展,以及结构变形的多样性。由嵌入在电子皮肤中的电加热器的电热刺激触发的按需驱动允许对软体的各个区域进行精确、独立的控制。此外,与无线模块的集成使机器人即使在植入体内时也无需束缚即可进行控制和通信。
为了展示广泛的实用性,作者进一步开发了针对特定应用场景量身定制的软机器人。具体来说制作了:
一个可环绕膀胱的软体机器人夹持器,以实现膀胱容量评估和电刺激的协调闭环操作,以治疗膀胱过度活动症;
一个可缠绕血管以测量血压的机器人袖带;
一个可驻留在胃中以长时间感测 pH 值和输送药物的可摄入机器人。
最后使用小鼠模型进行的体内研究证明了软体机器人治疗夹持器能够轻轻包裹跳动的心脏、对电生理活动进行时空评估、量化心脏收缩力以及提供电刺激进行功能调节。
这些演示展示了此类软体机器人作为具有结构智能和多功能性的下一代生物医学植入物的潜在应用。未来可以进一步增强软植入式机器人与生物组织之间的协同作用,以实现动态生理环境中的生物相容性和长期稳定性,从而改善慢性病的治疗。
▼参考资料
Zhang, L., Xing, S., Yin, H. et al. Skin-inspired, sensory robots for electronic implants. Nat Commun 15, 4777 (2024). https://doi.org/10.1038/s41467-024-48903-z.
*本文仅分享医疗科技前沿进展,不代表平台利益。如涉及版权问题,请联系我们删除。
END
编译 | 刘帅
来源 | Nature Communications
审核 | 医工学人
关注“医工交叉前沿技术”,可进入医工学人交流群

群主微信(申请时请备注个人信息)
点击关注医工学人



本篇文章来源于微信公众号: 医工学人
