




星标“医工学人”,第一时间获取医工交叉领域新闻动态~

前言
/
无线胶囊内窥镜 (WCE) 可对消化系统进行非侵入性评估,无需镇静,也不存在传统内窥镜检查的风险。其重要性在于诊断胃肠道组织异常,尤其是小肠异常。
然而,现有的商用 WCE 设备面临局限性,例如缺乏自主病变检测和治疗能力。微机电制造和计算方法的最新进展促使人们广泛研究将复杂的技术集成到商用胶囊内窥镜中,旨在取代有线内窥镜。
本综述讨论了智能胶囊机器人的未来需求,对各种方法的优缺点进行了比较评估,并重点介绍了与 WCE 相关的六项技术的最新发展。这些包括近场无线电力传输、磁场主动驱动、超宽带/体内通信、混合定位、基于人工智能的自主病变检测以及磁控诊断和治疗。此外,我们还探讨了未来“胶囊外科医生”的可行性。详细工作于5月30日报道在了《Nature Commucations》杂志。
WCE 机器人发展里程碑及其未来概念设计时间表
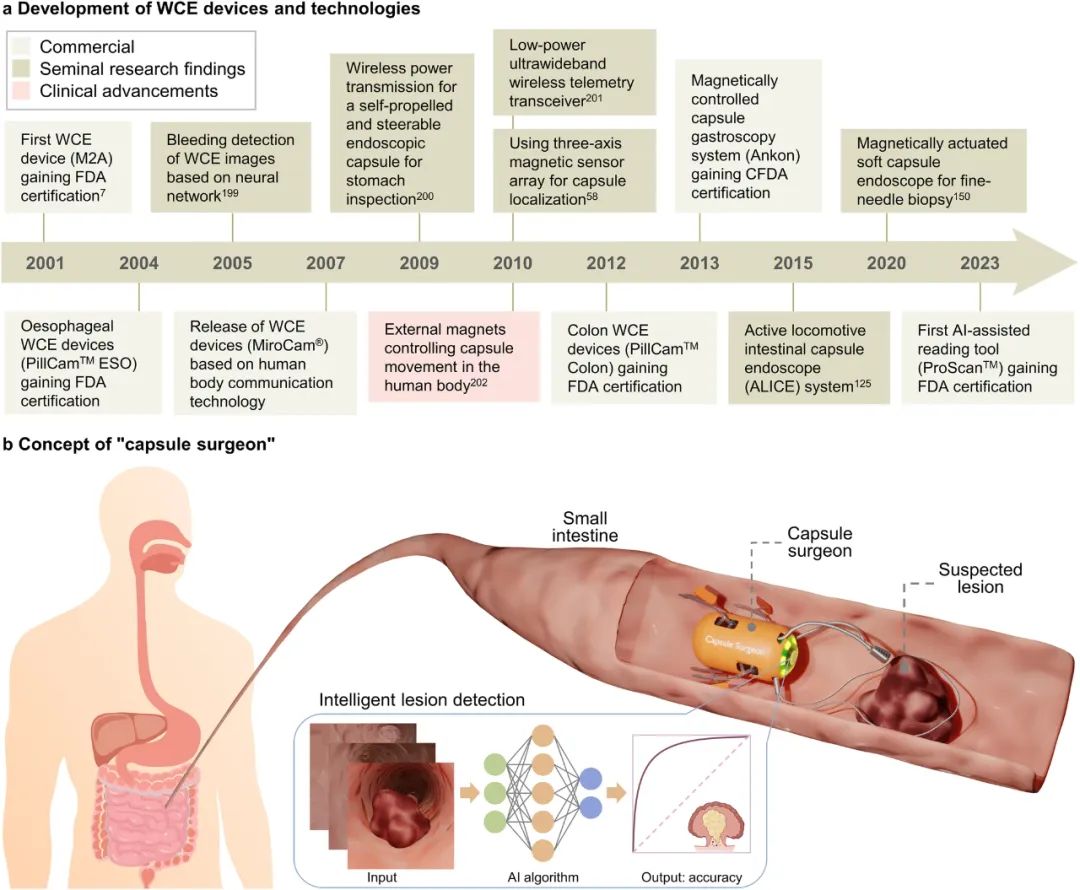
a. WCE 设备和技术的发展。时间线展示了 2001 年至 2023 年 WCE 设备的商业化进展、开创性研究成果和临床进展。WCE 无线胶囊内窥镜,FDA 美国食品药品监督管理局,CFDA 中国食品药品监督管理局。
b. “胶囊外科医生”的概念。胶囊机器人利用智能检测算法对潜在病变进行检查。在识别出异常组织后,胶囊可以固定其位置并通过其功能组件启动药物程序。这些组件多种多样,可能涉及圈套器、高频电切刀或止血夹、人工智能。
WCE传统技术的缺陷与当前前沿技术
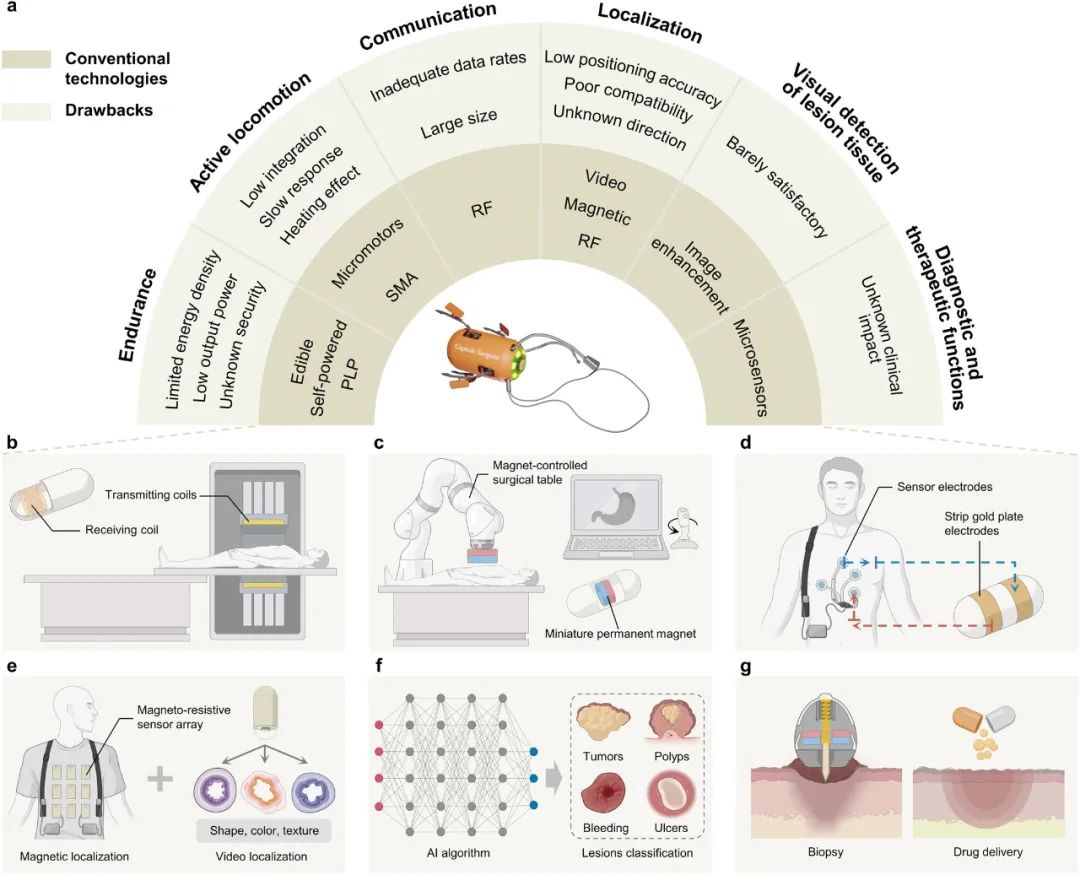
a. 传统方法的缺点。PLP封装的锂离子聚合物、SMA形状记忆合金、RF射频。
b~g,先进智能技术的工作原理:
b. 近场无线电力传输。病人躺在手术台上,体内有一个发射线圈和一个装有接收线圈的胶囊。
c. 磁场主动驱动。医生通过手柄操纵装有外部磁铁的机械臂,控制装有磁铁的内部胶囊的运动。
d. 体内通信。一个装有多个电极的可穿戴接收器与胶囊上的两个条形金电极相环绕。
e. 磁铁/视频混合定位。磁定位依赖于外部磁阻传感器阵列,视频定位利用形状、颜色和纹理等组织特征进行识别。
f. AI算法实现病变分类。
g. 磁场控制胶囊执行诊断和治疗功能,可以在目标位置进行活检或药物释放。
WCE 的磁场主动驱动技术
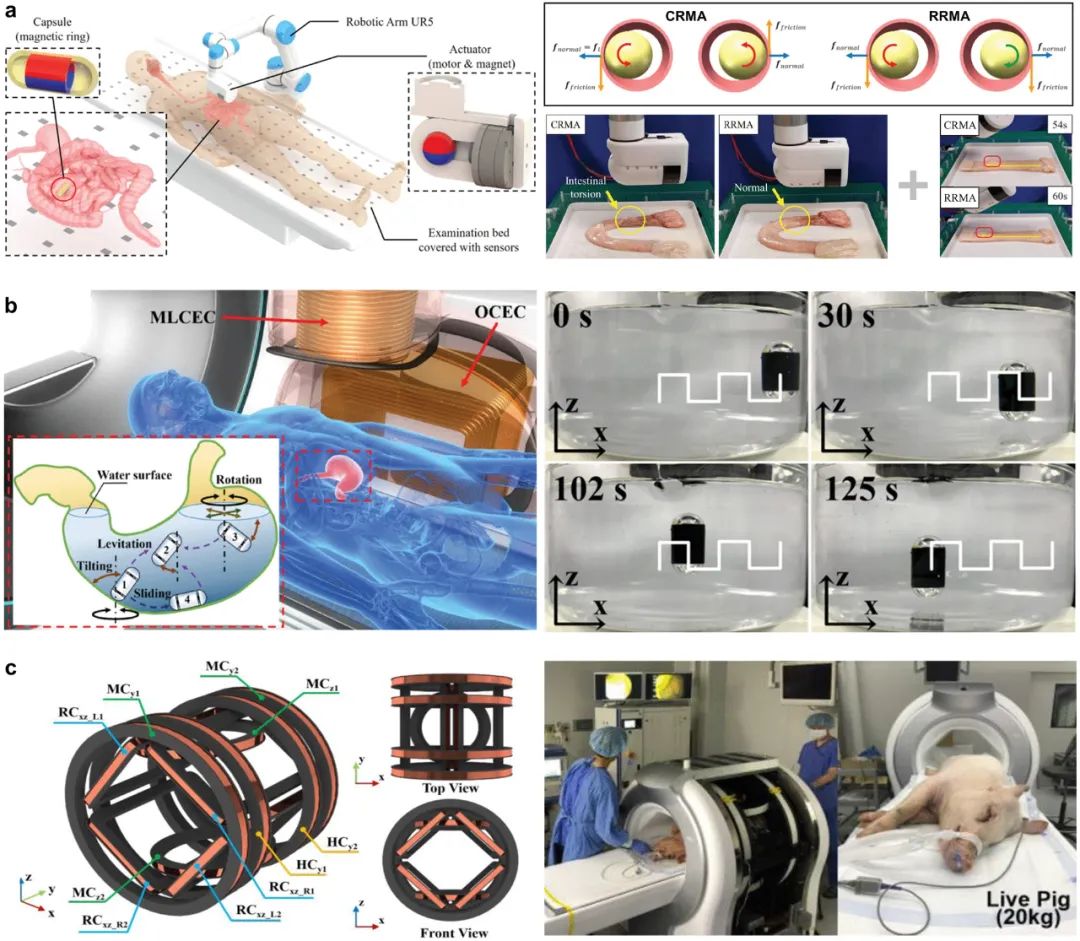
a. 外部磁铁通过 RRMA 驱动 WCE 机器人安全通过肠道。左图:平台示意图。右上:受力分析。右下:肠道胶囊运动对比实验。CRMA 连续旋转磁驱动,RRMA 往复旋转磁驱动。
b. 添加的电磁线圈实现了胶囊机器人的高精度悬浮控制。左图:平台示意图。右图:胶囊模型以期望的方波轨迹执行磁悬浮平移运动的图像序列。MLCEC 磁悬浮控制电磁线圈,OCEC 方向控制电磁线圈。
c. 矩形线圈驱动系统提高了患者对卧位的耐受性,并已在猪的临床试验中进行了测试。左图:电磁线圈模型。右图:使用活猪的体内实验装置。HC 亥姆霍兹线圈、MC 麦克斯韦线圈、RC 矩形线圈。
基于人工智能的综合病理分析模型
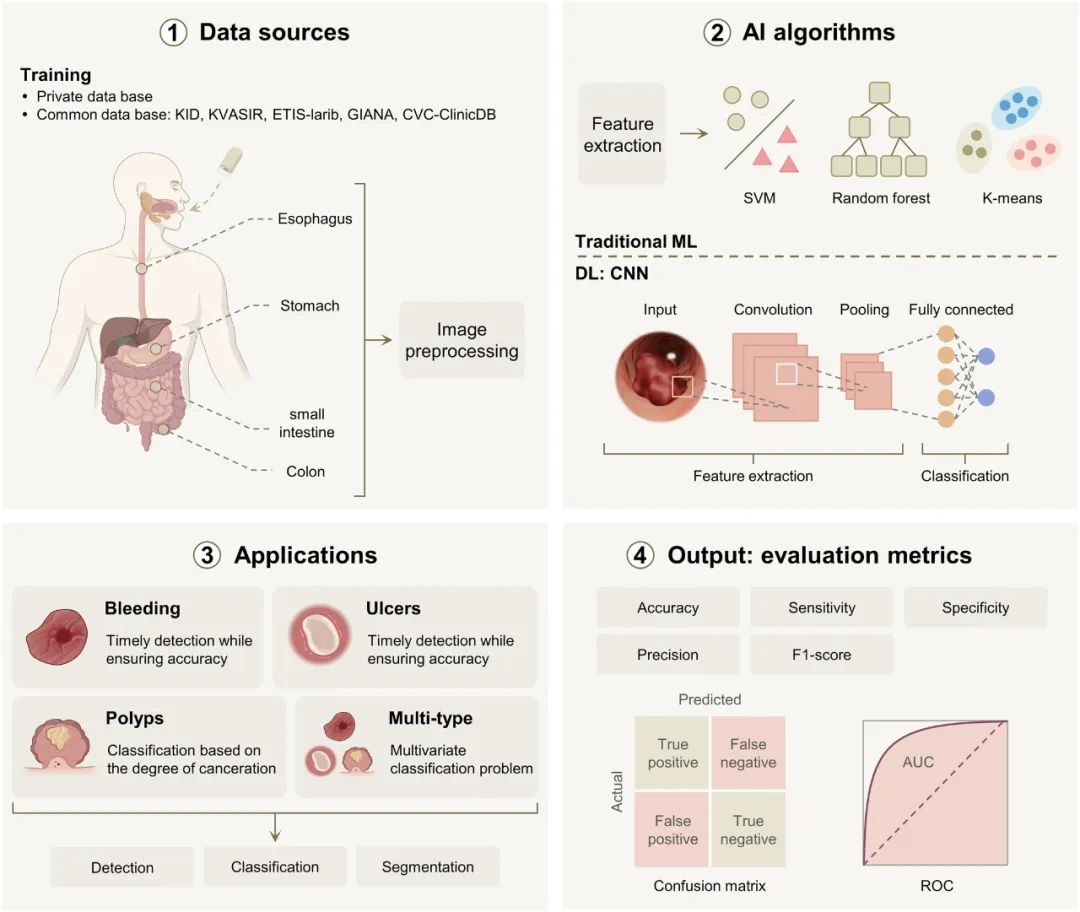
该过程从 WCE 设备捕获胃肠道图像开始,然后对其进行预处理并用作 AI 算法的输入。该算法的架构可以根据不同的特征提取和分类方法分为传统机器学习和深度学习。后续图像处理将结合 WCE 的具体应用场景和分析任务进行。最终,模型输出相关指标以确定其性能。ML 机器学习、DL 深度学习、SVM 支持向量机。
磁控胶囊诊疗机器人
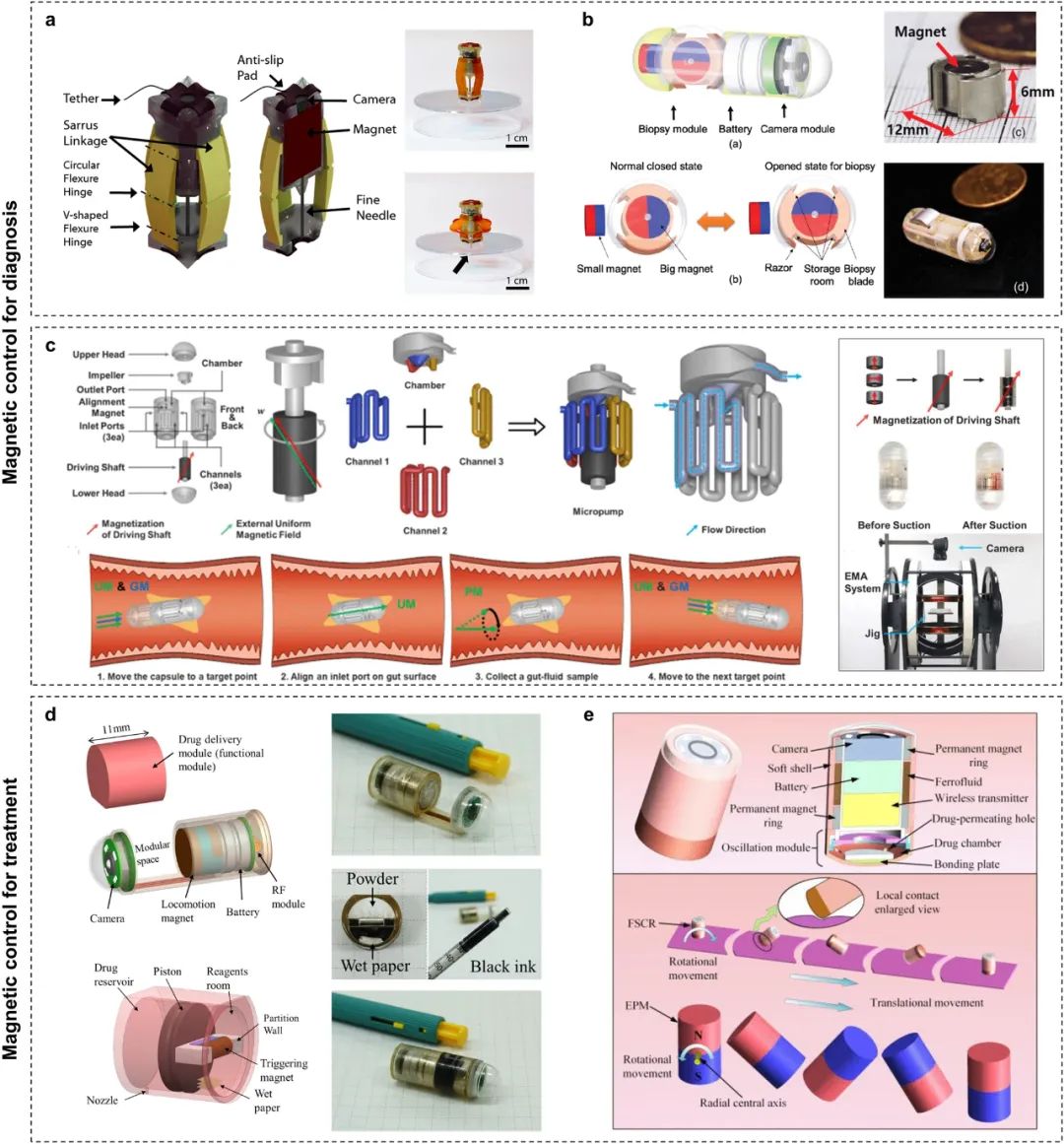
a. 基于软Sarrus连杆概念的微针毛细管活检胶囊机器人。左:三维模型设计。右:机器人在磁力下的实际变形。
b. 带刮刀组件的活检胶囊机器人。左上:带活检模块的WCE机器人的概念设计。左下:拟议的活检模块及其在运动和活检操作过程中的状态。右上:组装好的活检模块。右下:用于活检的WCE设备的完整原型。
c. 用于肠道微生物组的主动多次采样胶囊。左上:总体设计。左下:由外部磁场控制的胶囊采样过程。右:制造的组件和完全组装的胶囊。UM均匀磁场,GM梯度磁场,PM进动磁场。
d. 被动磁性药物输送胶囊。左上:药物输送胶囊内窥镜的设计。左下:拟议的药物输送模块的结构。右:WCE的组装和原型。
e. 主动磁性药物输送胶囊。顶部:FSCR的外部和剖面视图。底部:FSCR 和 EPM 的表面滚动运动图。FSCR 磁流体软胶囊机器人。
WCE 临床整合的转化策略
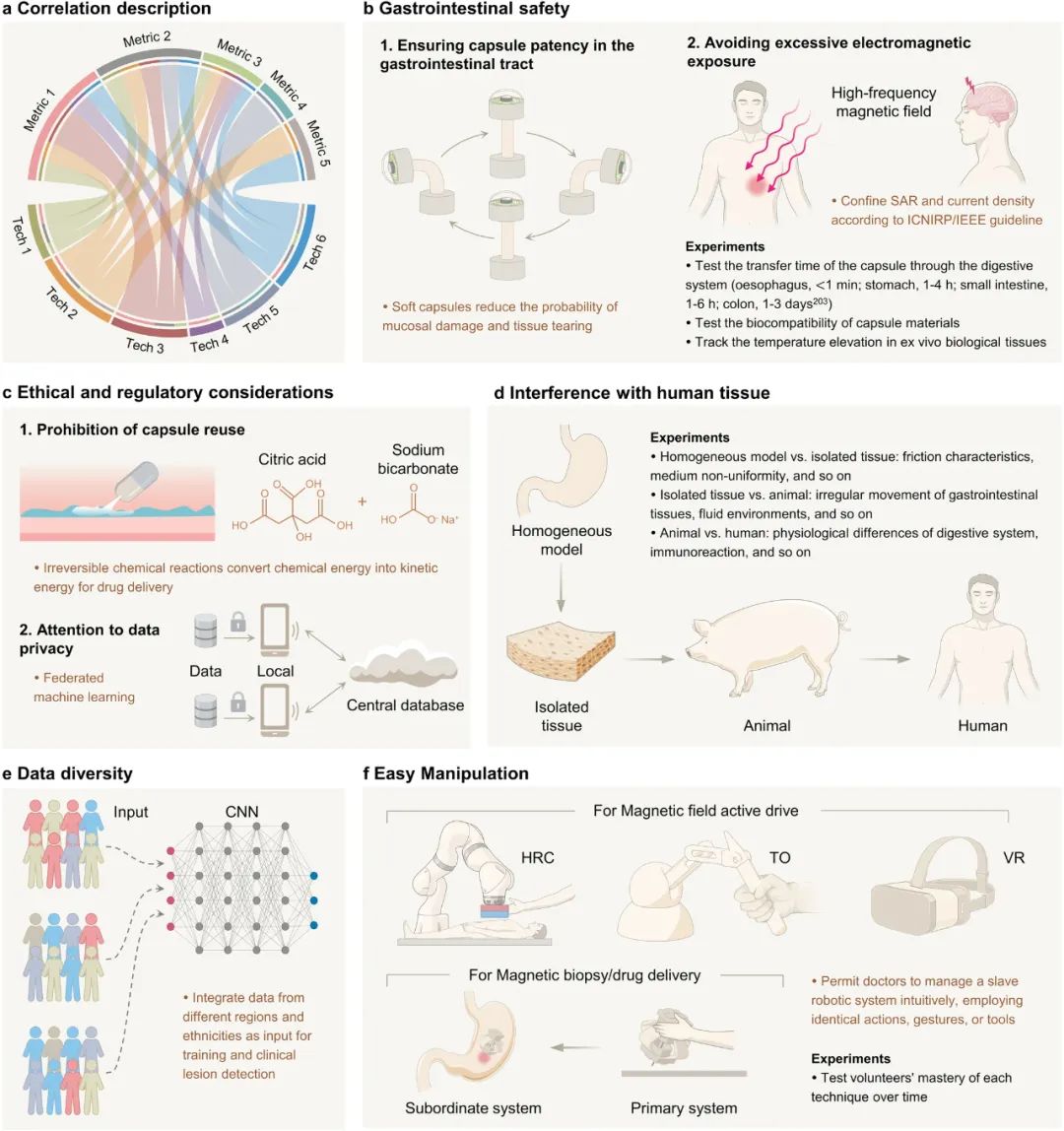
a. WCE 临床指标与先进智能技术的相关性。指标 1–5:从胃肠道安全到易于操作;技术 1–6:从近场无线电力传输到磁控诊断和治疗。
b – f,指南和关键实验:
b. 胃肠道安全203。SAR特定吸收率,ICNIRP 非电离辐射防护,IEEE 电气和电子工程师。
c. 道德和监管考虑。
d. 对人体组织的干扰。
e. 数据多样性。
f. 易于操作。HRC 人机协作、TO 遥控操作、VR 虚拟现实。
WCE 未来发展所需的关键技术进步
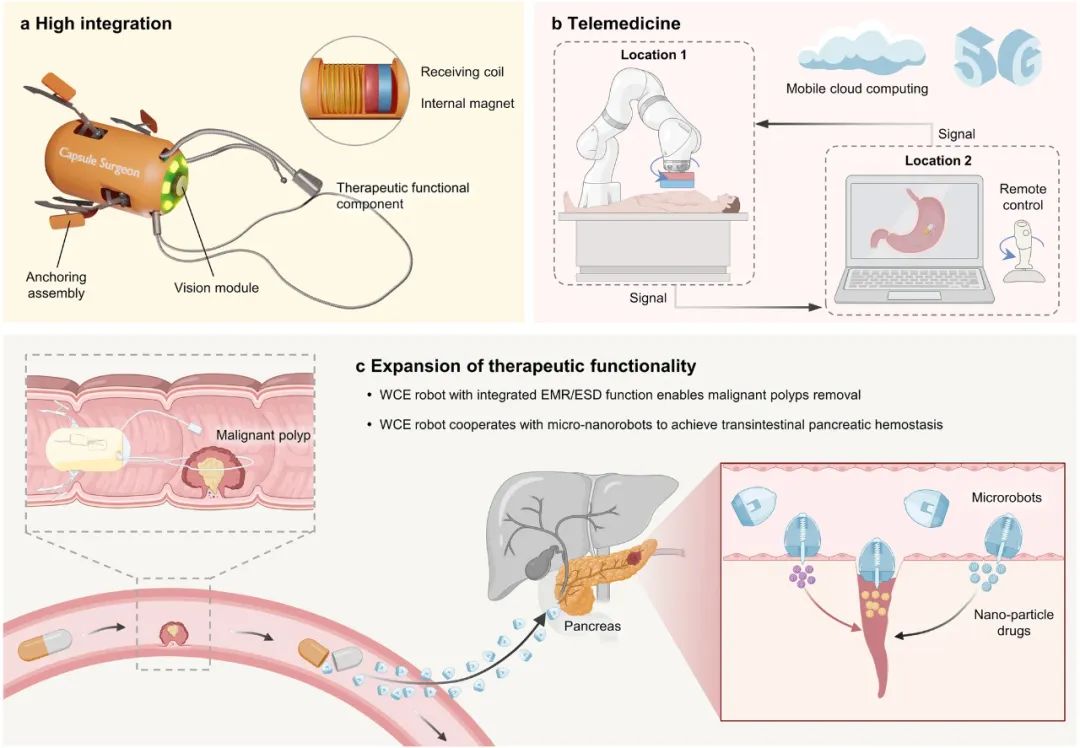
a. 实现高度集成。一种可行的方法是将磁铁和线圈安装在胶囊内,以便在外部磁场下进行 WPT、主动运动、定位、诊断和治疗。
b. 远程医疗。移动云计算与 5G 通信的结合可以促进远程医疗功能。
c. 扩展 WCE 机器人的治疗功能。它不仅限于恶性息肉切除和多尺度机器人协调,用于在通常无法进入的区域进行治疗。EMR 内镜黏膜切除术、ESD 内镜黏膜下剥离术。
结论
作为 WCE 机器人的长期发展目标,可以考虑以下三个重要领域:
1.高集成度:尽管胶囊机器人比传统的有线内窥镜具有优势,但其功能集成仍然有限。典型的功能结构在胶囊中占据大量空间,甚至使胶囊太大而无法吞咽。虽然集成这些新技术仍然是一个复杂的问题,但潜在的解决方案可能是采用单驱动技术来执行多种功能。在其他选择中,磁力驱动以其消除复杂机制的能力而著称,减少了对机载电源的需求,从而降低了设备的整体尺寸和复杂性。克服空间限制的另一种方法可能是使用群体胶囊机器人,每个机器人都有特定的功能。尽管目前的研究正在探索多个胶囊机器人的协同操作,但初步结果并不完全乐观。
2.远程医疗:在整个 COVID-19 疫情期间,出现了许多远程医疗计划,使临床医生能够在家中远程治疗患者。利用移动云协助和 5G 通信方面的最新进展,这种模式可以有效地引入 WCE 领域。这种方法不仅可以减轻与高风险患者接触相关的风险,还可以使欠发达地区的居民能够接受胃肠病学专家的临床诊断和治疗。
3.扩大治疗功能:WCE 机器人目前主要用于诊断和治疗功能,例如活检和药物管理,而不能完全去除病变组织。内镜黏膜切除术 (EMR) 和内镜黏膜下剥离术 (ESD) 已成为早期恶性胃肠道病变微创切除的黄金标准,通常集成到有线内窥镜中。技术进步,尤其是电源方面的进步,有可能将 EMR 和 ESD 功能整合到胶囊中,从而大大拓宽其临床应用领域。此外,医疗微纳米机器人在治疗、手术、诊断和医学成像领域的有效性已得到验证。更大规模的 WCE 机器人可以充当“航母战舰”,而微纳米机器人集群则充当执行组织治疗任务的“士兵”。这一策略不仅充分利用了多尺度的优势,还为探索消化系统内 WCE 机器人以前无法到达的位置(如胰腺)开辟了可能性。
实现上述愿景需要大量的技术迭代。即使不专注于配备摄像头或保持胶囊形状,将 WCE 与附加功能集成的设计模式的最新进展也可以提供有价值的见解。例如,可摄入的电疗胶囊,其外壳表面有圆周电极或集成在其中的导电钩探针,有助于调节激素释放并增强胃肠道组织活动。这种电刺激疗法为 WCE 机器人治疗糖尿病、肥胖症和轻度胃轻瘫等慢性疾病提供了一种新的研究途径。随后,有必要在胶囊内添加磁性软材料来代替传统的硬磁体。最近的研究探索了使用双磁膜作为双重药物释放的软阀和多层磁性软机器人粘附在各个目标点的内部伤口上。磁性薄膜不仅具有集成优势,而且还通过其对磁场的多模态响应扩展了 WCE 的治疗能力。此外,利用磁场触发化学反应的充气胶囊机器人已被证明可用于减肥和肠道止血。
在这个变革时代,可以预测,WCE 技术的未来十年将见证胶囊机器人成熟为“胶囊外科医生”。一旦被患者吞下,这些机器人将能够自行导航并在胃肠道内执行微创治疗,从而消除了医生直接干预的必要性。
▼参考资料
Cao, Q., Deng, R., Pan, Y. et al. Robotic wireless capsule endoscopy: recent advances and upcoming technologies. Nat Commun 15, 4597 (2024). https://doi.org/10.1038/s41467-024-49019-0
*本文仅分享医疗科技前沿进展,不代表平台利益。如涉及版权问题,请联系我们删除。
END
编译 | 刘帅
来源 | Nature Communications
审核 | 医工学人
关注“医工交叉前沿技术”,可进入医工学人交流群

群主微信(申请时请备注个人信息)
点击关注医工学人



本篇文章来源于微信公众号: 医工学人
