




简介
在跳动的心脏内,很难用传统的介入工具进行手术操作。来自马萨诸塞州波士顿大学的 Jacob Rogatinsky 及其团队开发了一种新型的微创心脏介入机器人平台,可以部署在心脏入口处并保持稳定,引导现有的介入工具到达目标部位。
该平台具有以下优点:
-
• 体积小,可通过血管进入心脏,并在心房、心室内伸展开;
-
• 良好的灵活性,可以到达多个解剖目标;
-
• 良好的稳定性,可以持续接触运动目标;
-
• 产生的力道足以进行各种心脏介入手术。
该平台有望解决微创心脏介入领域存在的诸多挑战,并为导管介入手术的发展带来新契机。
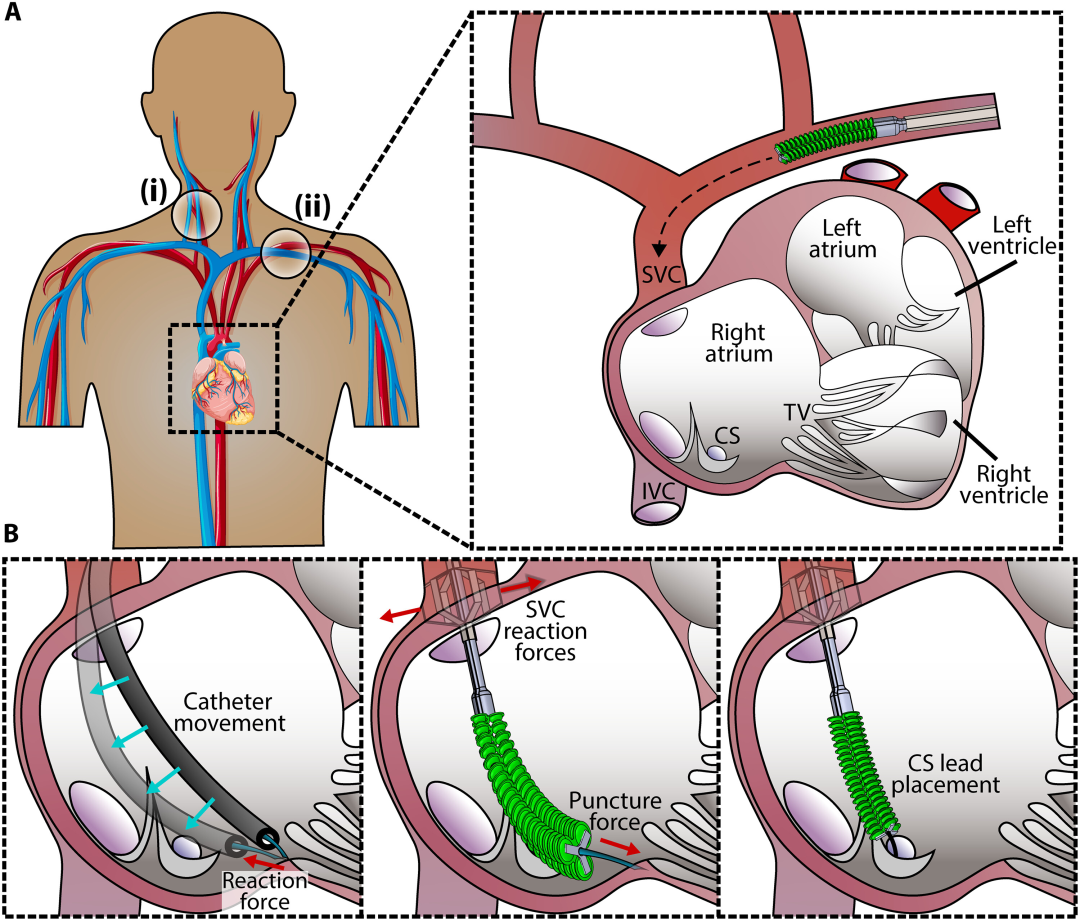
Figure. (A) 该装置通过(i) 右颈内静脉或 (ii) 左锁骨下静脉进入右心房。(B) 左图:传统导管当前面临的挑战,其固有的柔韧性使其难以施加力和准确控制位置。中图:作者开发的装置可以自行稳定在腔静脉上,以最大限度地减少远端力产生的损失。这种稳定性以及软体机器人的尖端使用户能够执行诸如三尖瓣环锚植入和冠状窦起搏器导线植入等手术。右图:机器人将导丝引导到冠状窦中。
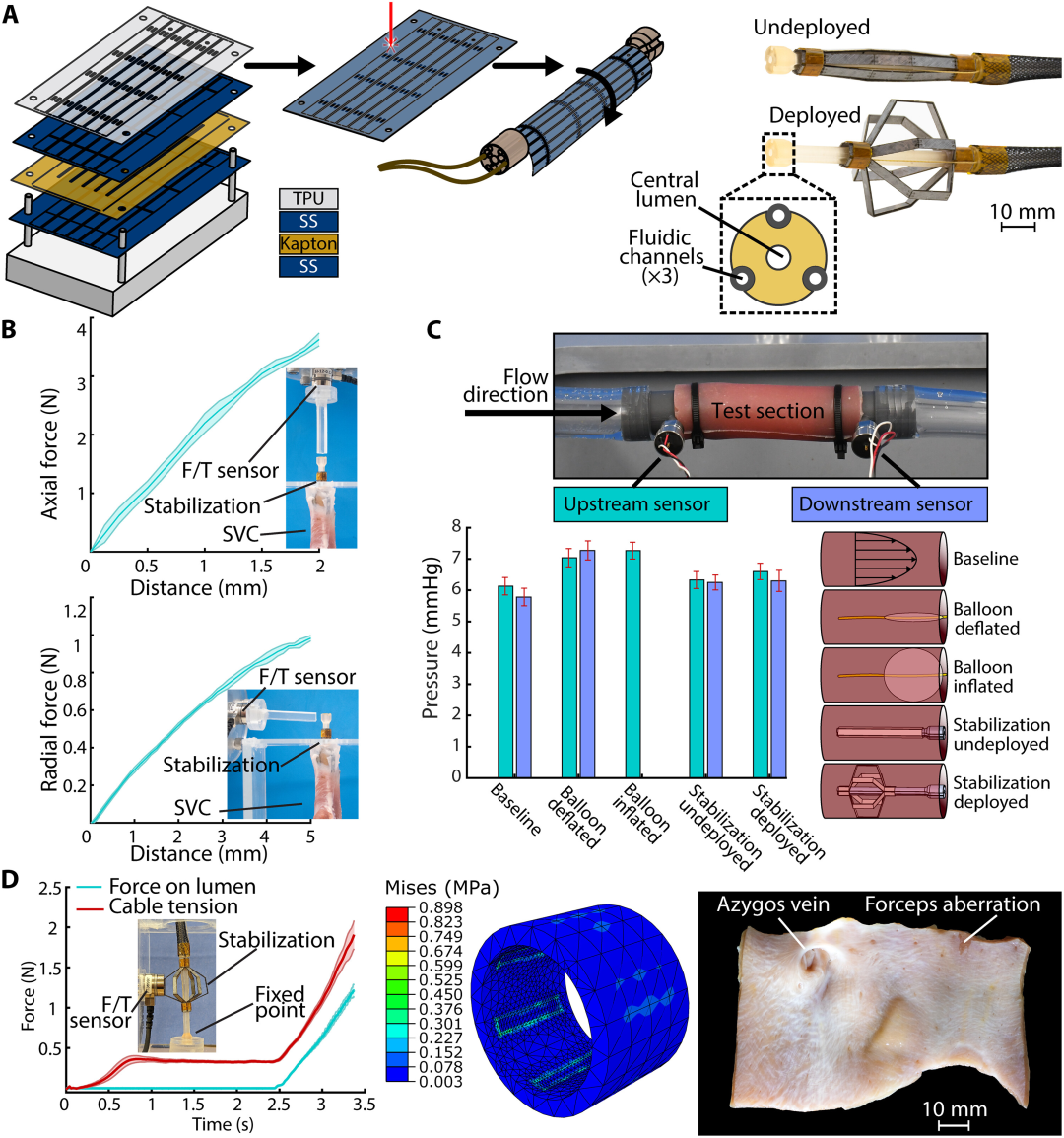
稳定装置的设计、制造和表征
软体机器人的引导
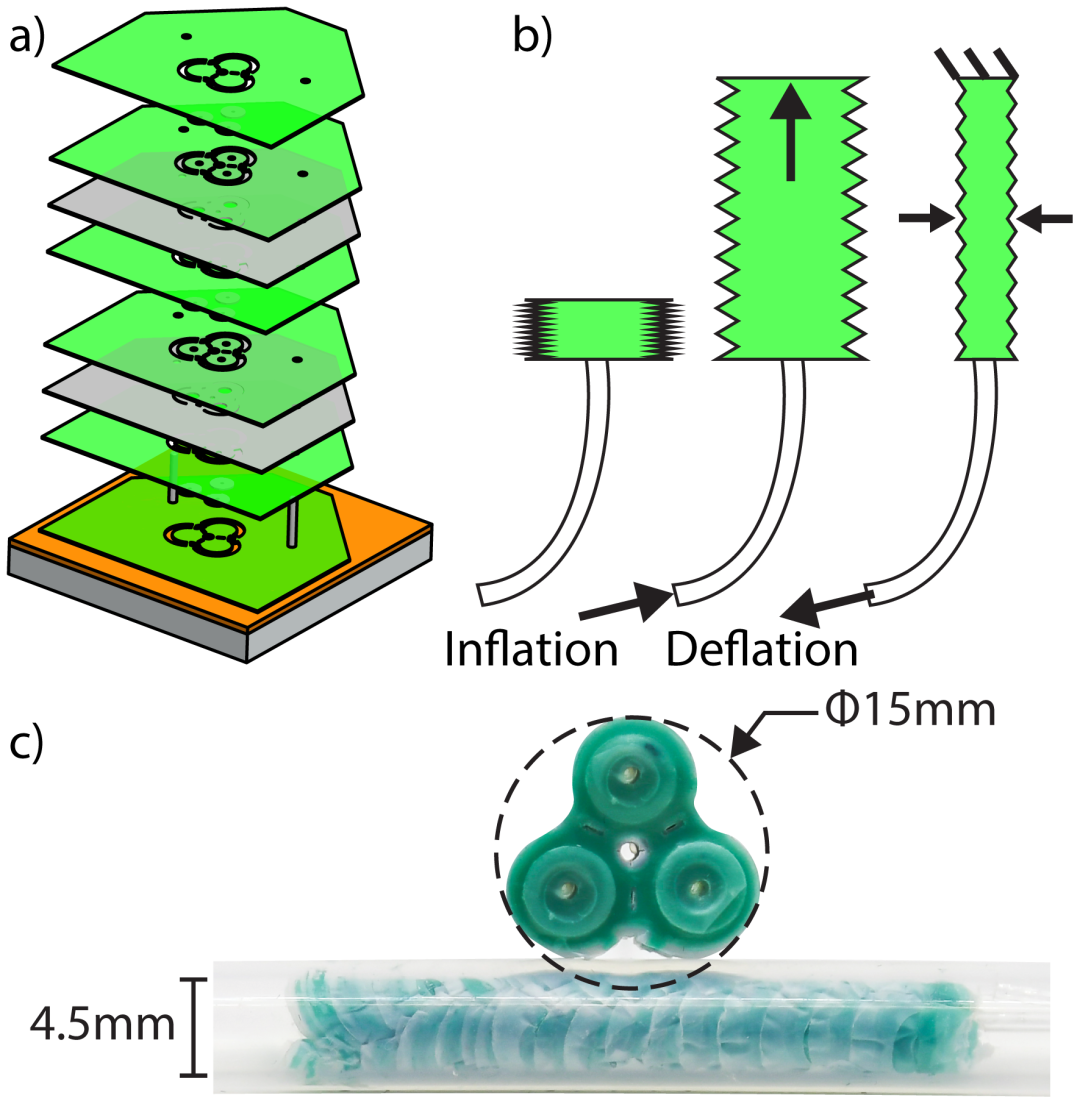
作者开发了一种新的软体机器人操纵器,称叠层气球致动器(stacked balloon actuator, SBA),它具有以下优点:
-
• 膨胀比大,力输出高
-
• 可径向塌陷至24 Fr的直径,便于通过血管输送
-
• 可通过施加真空以控制其径向尺寸
-
• 能够在弯曲和伸展时产生高达数牛顿的力
集成后的软体机器人平台
该装置的操作分为六个步骤:(i) 任天堂 Wii 经典控制器。(ii) 用户的输入被 Arduino Leonardo 微控制器转化为信号。(iii) 微控制器发送信号给三个线性电机(Actuonix, S20),分别操控3个充满水的注射器。(iv) 拉动注射器柱塞来部署稳定装置。(v) 稳定装置展开并靠在上腔静脉(SVC)上。(vi) 软体机器人头部通过第一至第三步来控制。
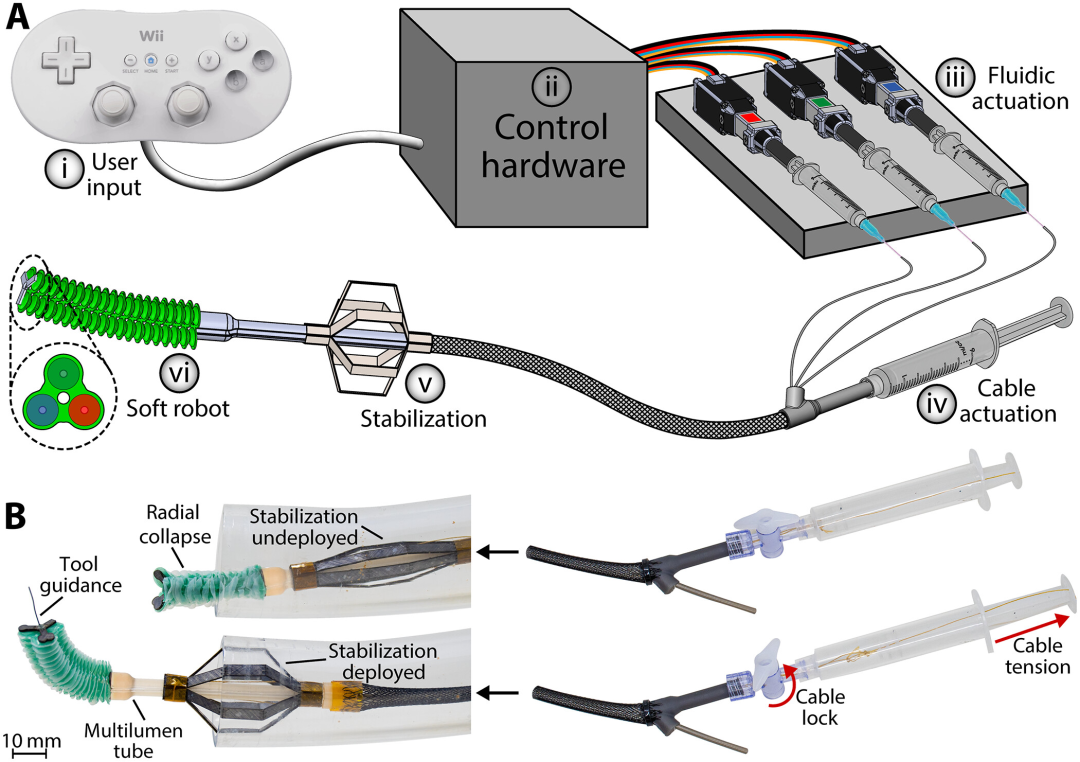
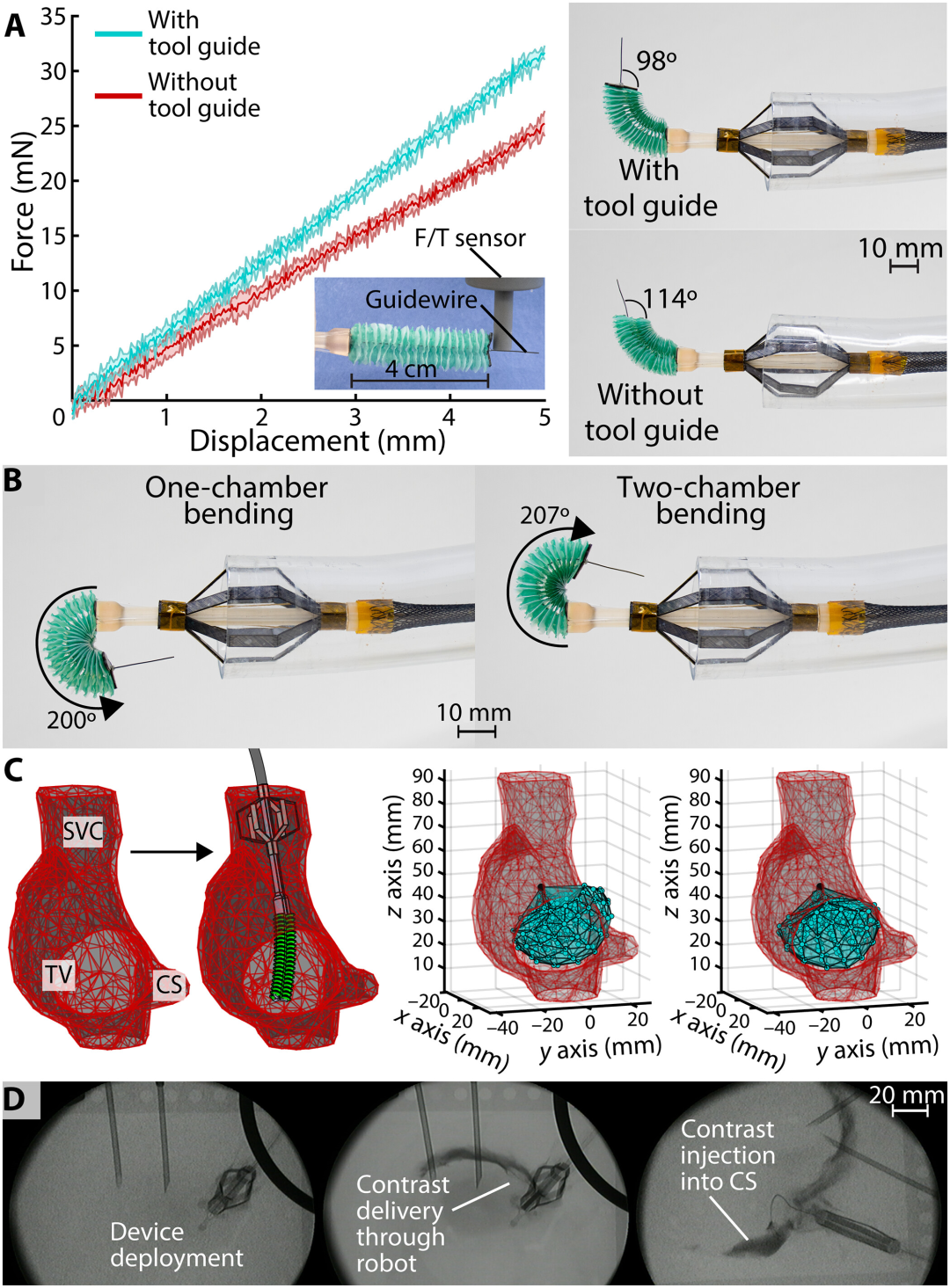
为了提高系统在引导介入工具时的刚度和准确性,在软体机械臂的尖端安装了一个二维工具导向器(如下图A、B所示)。三个单向挠性接头允许工具导向器在软体机械臂在径向塌陷时向内折叠(如上图B所示)。跨越设备长度的导管粘合在工具导向器的中心孔上,从而将用户端与设备的工具端连接起来。
文献:Jacob Rogatinsky et al.,A multifunctional soft robot for cardiac interventions.Sci. Adv.9,eadi5559(2023).DOI:10.1126/sciadv.adi5559
END
审核 | 医工学人


本篇文章来源于微信公众号: 医工学人
