




根据第六次全国人口普查及第二次全国残疾人抽样调查结果,2010年末全国残疾人总数为8502万,其中肢体残疾人数为2472万(29%)(中国残疾人联合会,2021)。肢体残疾者所面临的共同问题是无法正常步行,完成接近目标物、抓握和抛掷等动作。正常的上肢功能使得人们能够完成吃饭、穿衣、洗澡等基本日常活动,但是无法完成这些活动极大降低了肢体残疾者的社会参与感,并使其失去部分或全部劳动能力。可穿戴辅助设备具有柔软、可负担、轻巧、便携以及适用性强等特点,可以帮助上肢残障群体实现功能代偿以改善其生活质量。
01
基于纺织品的气动能量收集系统
目前,可穿戴的辅助、康复和增强设备都需要笨重的电源,这使得可穿戴辅助机器人成为一种负担。8月24日,美国莱斯大学RACHEL A. SHVEDA等人以“A wearable textile-based pneumatic energy harvesting system for assistive robotics”为题在Science Advances上发表了一种用于辅助机器人的可穿戴纺织气动能量收集系统,该系统通过集成在鞋垫中的纺织泵来手机能量,并将其存储在可穿戴纺织气囊中,以根据具体需要操作气动执行器。
图1 基于纺织品的能量收集系统的制造和穿戴 (A)用可热封的纺织品制造鞋垫EHD;(B)EHD组件的点子显微照片:内部开孔泡沫和外部纺织品;(C)用于制造ESB的织物层以及连接EHD和ESB的气动回路示意图。
气动能量收集系统有两个均由纺织品制成的关键部件:鞋垫气动泵(energy harvesting device, EHD)和可穿戴气动蓄能器(energy storage blader, ESB),为尽量简单化制造与确保部件的可拓展性,该研究使用激光图案化定制设备然后热粘合纺织品层。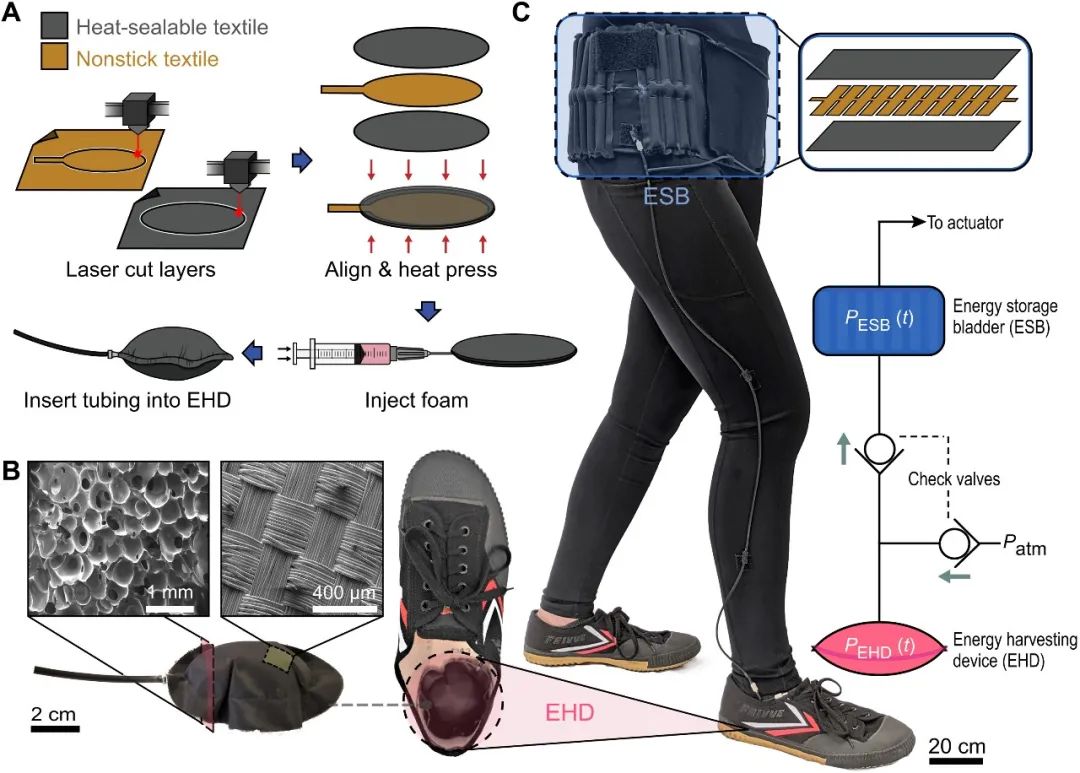
02 纺织能量收集系统的机械流体建模
在行走过程中,用户脚部施加的压缩力对 EHD 做机械功;EHD 将这项工作转化为加压气体的自由能,然后将其传送并存储在 ESB 中以供以后使用。为评估该能量收集系统的性能,测试了 55 公斤的用户在跑步机上以 3 英里/小时(4.8 公里/小时,对应于 30 岁以下成年人的平均步行速度)步行,该系统在行走过程中成功提取和存储气动能量,并用于驱动两个基于纺织品的致动器。
图2 能量收集系统的性能表征 (A)佩戴能量收集系统的用户在实验测量期间在跑步机上行走;(B)用于性能评估和优化的机械流体模型的示意图。插图显示了实验测量的步进力(实线)以及用于对其建模的匹配梯形波形(虚线)。( C ) 模型预测的瞬态压力轨迹(虚线曲线)根据实验测量值(实线曲线)进行了验证。( D ) 预测并测量了 55 公斤用户以 3 英里/小时的速度行走的 ESB 内的气压。( E) 鞋垫 EHD 的最大功率输出与现有的电磁、压电和摩擦电脚踏能量收集系统的比较。
使用准静态力平衡模拟EHD中流体流动从而对其泵送性能进行表征。为简化分析,该研究使用理想气体状态方程对袋内空气进行建模。并使用安装在用户鞋垫上的力感应电阻器测量行走过程中 EHD 上的踩踏力。该机械流体模型模拟得到的压力轨迹与实验测量结果具有很好的一致性,同时,使用该模型计算得到的系统最大平均功率显示该能量收集方法优于所有使用电机机构进行能量收集的方法。 03 针对不同用户和步行速度验证系统性能
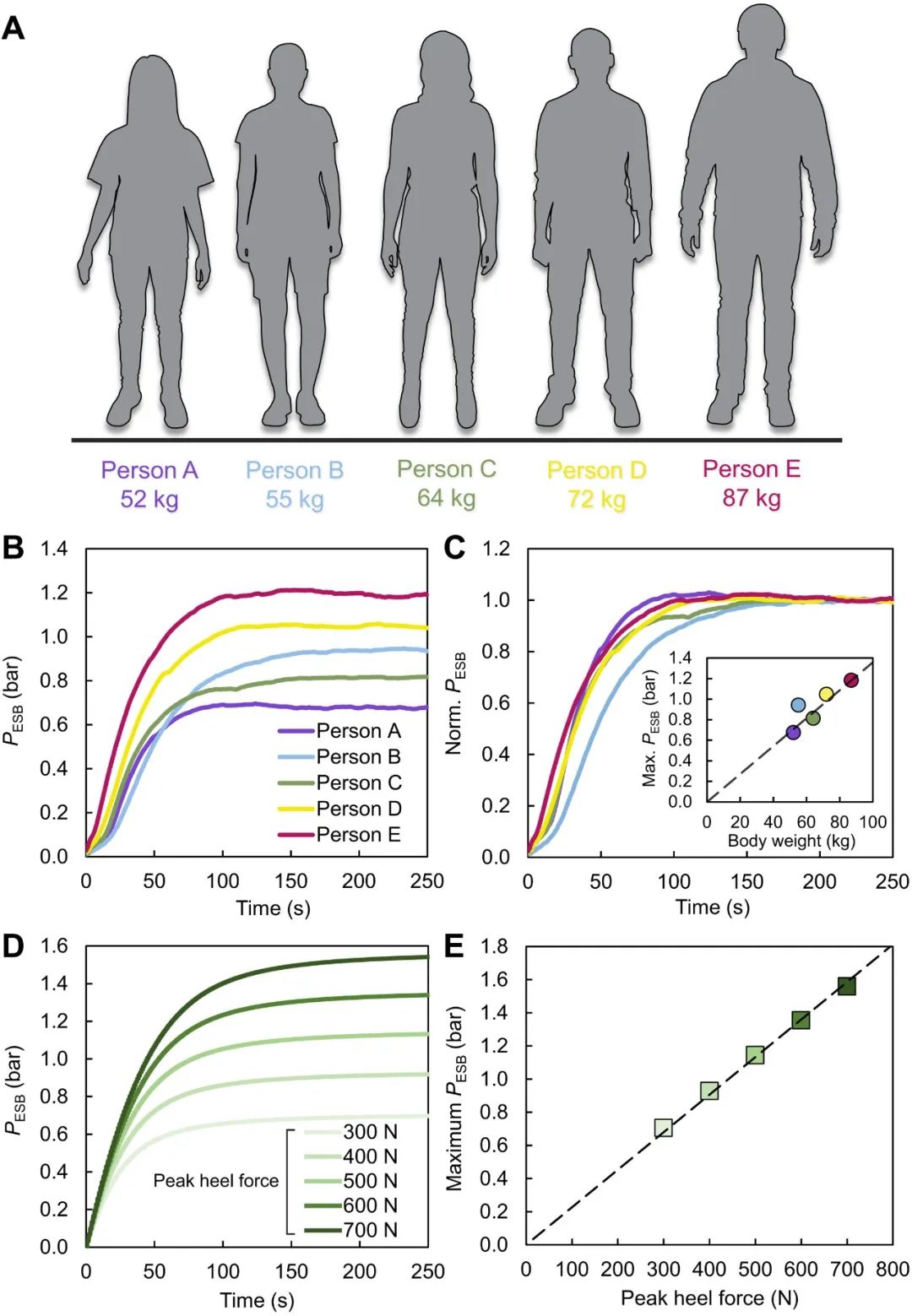
在对步行速度和体重与系统性能之间的相关性验证实验中发现步行速度处于1到3mph之间时,该系统无明显变化,这意味着该系统可以在较低的步行速度下保持良好性能。同时在不同体重参与者的实验中发现参与者体重和其足跟力强相关,同时足跟力与施加在EHD上的峰值压力强相关,但这一过程中系统的压力填充时间并没有显著改变。
图3 不同体重参与者对系统性能进行评估 (A)代表一系列体重、腿长和脚尺寸的测试用户群。( B ) ESB 压力记录为 35 毫升 EHD 和所有以 3 英里/小时行走的五个用户的时间函数。原始压力数据在两个步骤周期内平滑,然后平均超过三个重复。( C ) (B) 中由最大 ESB 压力归一化的压力轨迹显示用户之间的填充时间没有显着变化。插图表明最大 ESB 压力与用户体重成比例增加。( D ) 机械流体模型的瞬态响应,来自步进力幅度的参数扫描,模拟不同体重的用户。( E) (D) 中的最终 ESB 压力与施加在 EHD 上的峰值侧倾力成比例增加。 04 使用收集的气动能量为辅助致动器供电
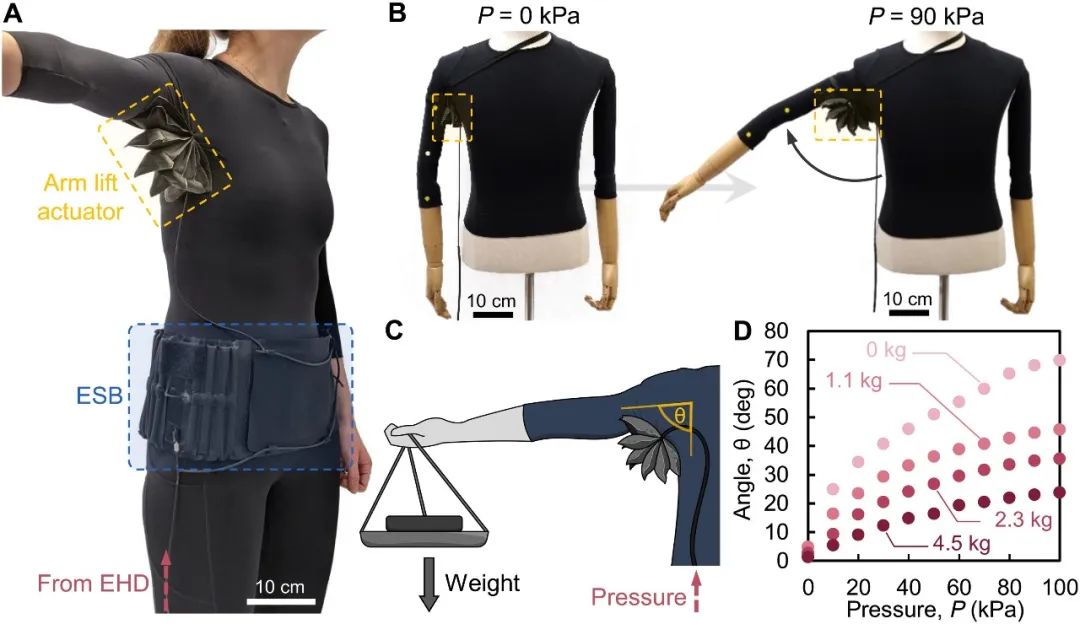
该能量收集系统所产生的能量能够满足两个由纺织品制成的气动致动器 图4 气动臂提升辅助致动器
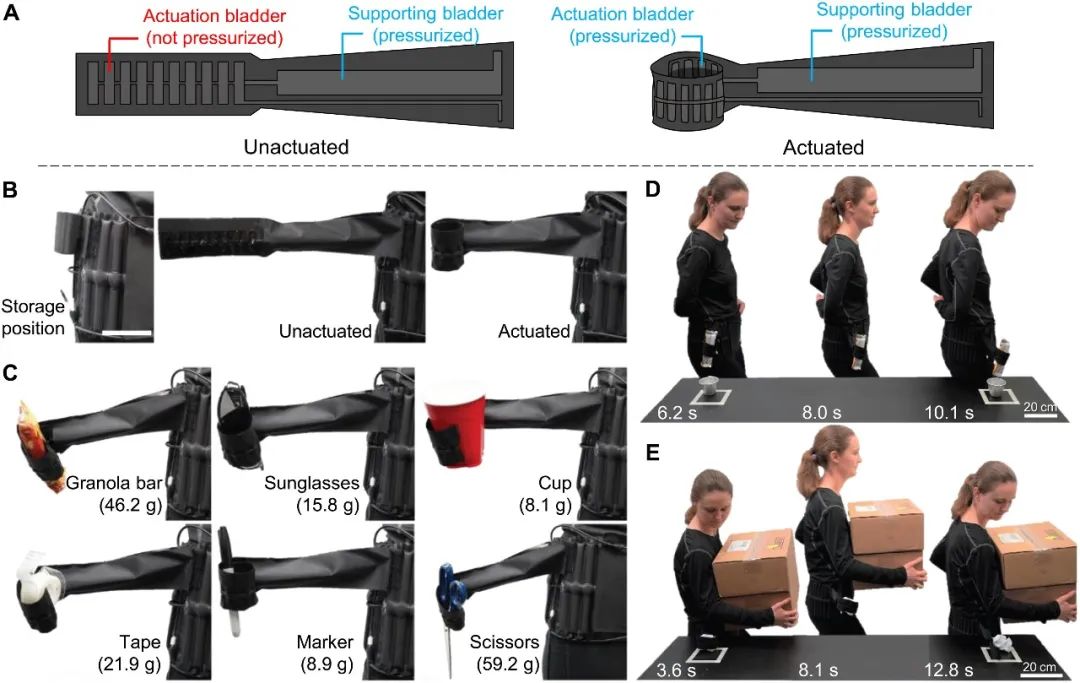
图5 气动能量收集系统可为外部机械臂提供动力 (A)双气囊系统的示意图,该系统提供机械强度并实现夹持器的驱动。(B)第三手臂,展开时(未启动)和启动时。(C)第三手臂抓取各种形状、重量和表面纹理的物体。(D) 用户使用第三手臂拿起、转运和交付 43 克格兰诺拉麦片棒的延时序列。(E) 第三只手臂用于在用户的手臂已满时拾取和转运一张纸。 05 总结及未来展望
这项工作所开发的基于纺织品的能量收集系统将通过为促进日常生活活动的辅助可穿戴设备提供动力来支持上身功能受限的个人,从而提高生活质量并降低社会参与的障碍。系统评估表明,它在最大平均功率方面优于所有其他依靠电动机构的足部撞击能量收集技术。在实验过程中,最大平均功率输出接近 3 W,能量转换效率达到 23%。当前的系统可以直接供具有不同步行速度或体重的用户使用,无需修改设计。此外,所设计的机械流体模型允许对系统进行优化功率、效率和输出特性,以满足特定用户的需求。
此外,该系统制造过程简单、便宜,使用现成的纺织材料和成熟的工艺,如热封,可以很容易地进行大规模生产。因此,论文作者认为,基于纺织品的系统可以为可穿戴设备提供轻质、低成本的解决方案,这将推动该技术解决当前辅助和康复设备因其笨重电源所带来的限制。 论文信息: Shveda, R.A., Rajappan, A., Yap, T.F., Liu, Z., Bell, M.D., Jumet, B., Sanchez, V., & Preston, D.J. (2022). A wearable textile-based pneumatic energy harvesting system for assistive robotics. Science Advances, 8. https://www.science.org/doi/10.1126/sciadv.abo2418# 诚邀您的来稿 媒体转载联系授权可添加下方微信 医工学人简介
医工学人是在医疗科技创新与医工交叉背景下成立的多高校学生学术组织。旨在建立医学、工程学领域研究者的对话渠道,创造交流分享医工交叉前沿技术的优质平台,推动医疗科技创新与医工交叉融合。
目前组织内共有两百多位来自复旦大学、西安交通大学、上海交通大学、清华大学、浙江大学、中国科学技术大学、各高校附属医院等30余所重点高校、医院及科研单位医工学科相关的医生、学生、专家学者等。欢迎志同道合的你加入我们!
医工学人报名请添加社群发起人微信(备注姓名+单位),请简单介绍一下想加入医工学人交流群的原因和感兴趣的方向,方便我们管理社群,谢谢! 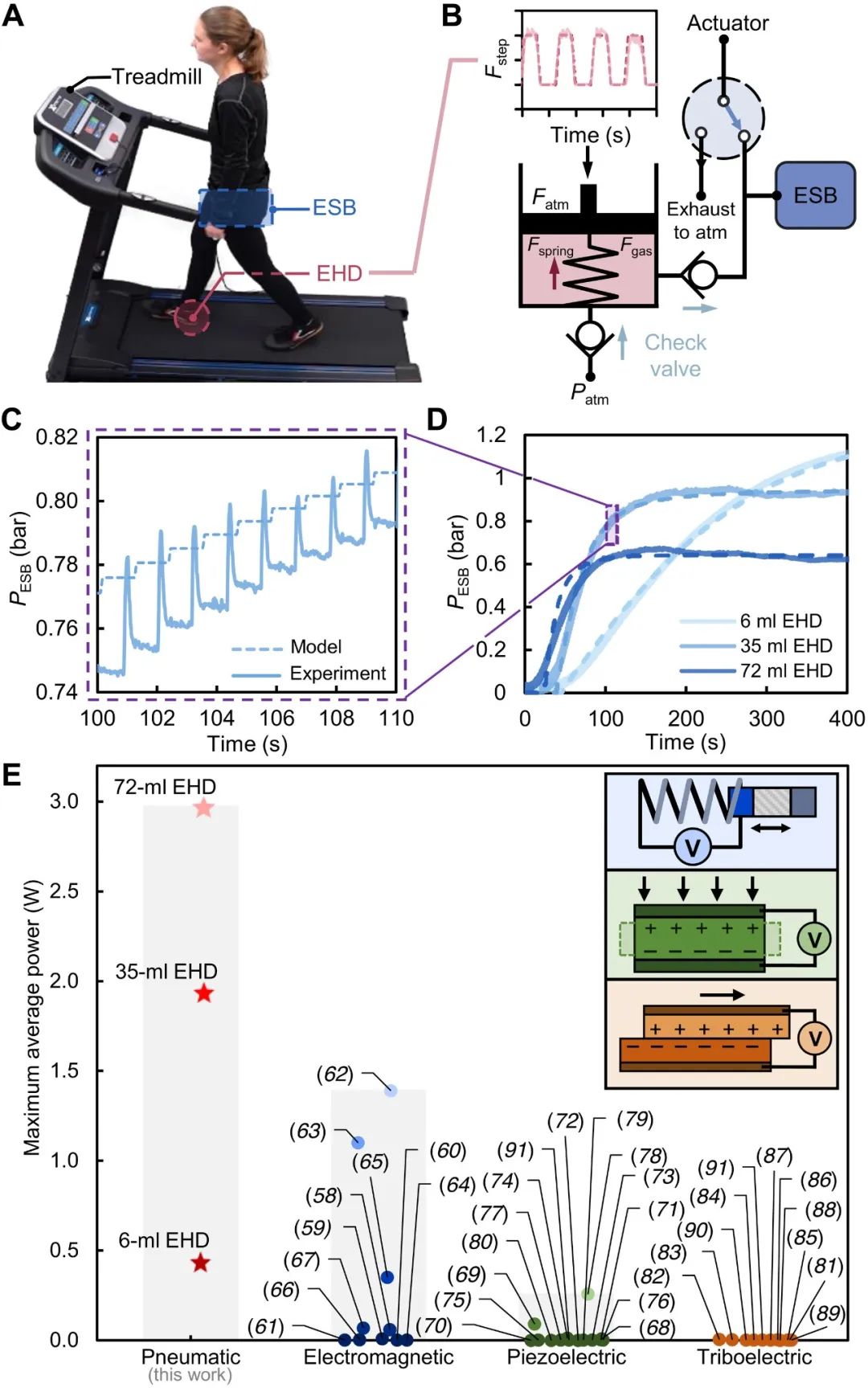



本篇文章来源于微信公众号: 医工学人
