




论坛 · 回顾
5月11日下午,“医工交叉前沿技术论坛”暨医工学人半月讲坛第四期于线上举行。复旦大学引进人才、生物医学工程技术研究所青年研究员、博士生导师陈文明老师做主题为《肌骨生物力学和步态装备的基础和应用研究》的讲座,讲座主要围绕Sports Tec(运动技术)、Orthopaedics(矫形外科)、Rehabilitation(康复)三个方向进行展示介绍,最后陈文明老师介绍了自己所在的生物力学与智能康复工程实验室的主要研究方向及取得的成果。
“
现代社会中,我们见证了生物力学研究如人工关节、先进假肢和康复设备的开发和广泛应用。例如,全髋关节的发育已经能够帮助患者无痛行走,甚至可以参加在20年前完全不可能实现的运动。此外,因外伤或疾病而截肢的人也可以配备智能假肢或假肢,并在余生中保持正常的步态功能。很明显,随着未来对更好生活质量的需求增加,生物力学领域将获得更多的增长和更广泛的应用。
生物力学与步态装备的基础和应用研究主要包括三方面:Sports Tech(运动科技)、Orthopaedics(矫形外科)、Rehabilitation(康复),陈老师就这三个方面的具体实践的案例展开介绍:
生物力学与步态装备在Sports Tech(运动科技)方面的研究和应用主要包括在:Enhance Running Mechanics(增强运动过程力学表现),具体有:Nike Sports根据人体足部的生物力学特性开发足功能提升的运动鞋,研究表明足部需要力学刺激来增强步行功能,特定功能的鞋类可提高人类的运动极限,使得步态能耗减少;Prevent Joint Injury(保护关节损伤),主要有:骨性关节炎治疗鞋,通过设置鞋底在内外侧刚度的不同,应对骨性关节炎的康复治疗;Earlier diagnostics(早期诊断):主要有:糖尿病病足的早期诊断、糖尿病引发神经性病变,从而使患者失去对足部力学的感知,患者的足部会在复杂因素下(神经性、力学、温度、适度等)发生溃烂,足底生物力学信息监测会做到糖尿病足溃疡(DFUs)的早期诊断和预防。
生物力学与步态装备在Orthopaedics(矫形外科)方面的应用研究主要有:Bone-Implant Interface(骨植入接口),具体指骨关节替换手术中的骨植入接口们需要考虑植入物的力学属性,使其满足正常功能并获得更好的使用寿命;Surgical Optimization(手术优化),通过在手术之前将手术部位进行生物力学分析,例如通过旋转某个关节部位使其达到最优效果从而完成手术优化;Clinical Force Transducer(临床所用力学传感器),具体有:人工力学传感器、Georg Bergian(德国)、传感器集成植入物等完成健康监测。
生物力学与步态装备在Rehabilitation(康复)方面的应用研究主要包括Balance Deficiency(平衡不足)、Gait Re-training(步态再训练)和Gait Restoration(步态重建)具体包括:帕金森患者步态功能障碍引起的平衡不足的监测和使用步态装备进行康复、骨关节炎的平衡不足的康复过程中的辅具设计;老年人因肌肉萎缩而引起的步态问题,通过生物力学监测和步态装备的辅助完成步态的再训练;以及以力学和肌骨动力学理论为基础进行步态装置的研究与开发,辅助步态重建。

紧接着,陈老师介绍了生物力学与步态装备的应用研究:
”
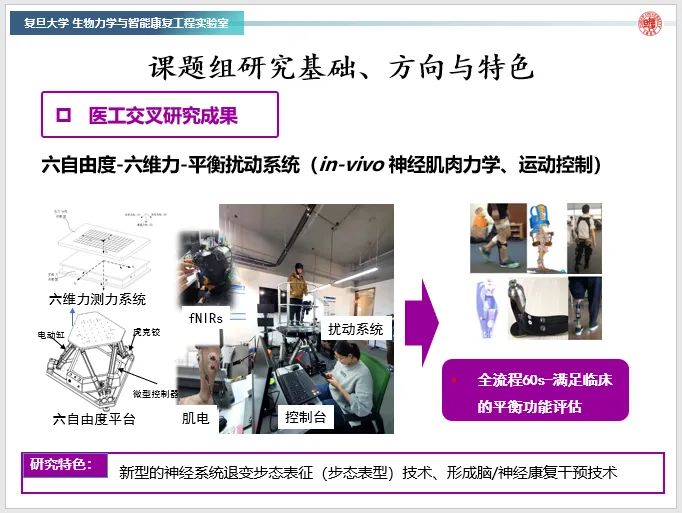
六自由度-六维力-平衡扰动系统(in-vivo 神经肌肉力学、运动控制):以六自由度平台与六维力检测系统为基础,在该平台上完成临床平衡功能检测的相关动作,并同步进行参与者功能性近红外光谱(fNIRs)、肌电(MEG)等生理信号检测,完成全流程60s的临床平衡功能评估。该项研究的特色在于:探究新型的神经系统退变步态表征(步态表型)技术以形成脑/神经康复干预技术。
多维、柔性人机交互力学传感技术(步态分析、假肢力觉系统重建):开发多维、柔性人机交互的力学传感器是包括机器人抓手、力学信息检测等领域在内的热点研究问题。用于步态分析与假肢力觉系统重建的多维、柔性力学传感器在为步态分析中提供更友好的人机交互界面的同时检测更加丰富的力学信息;假肢力觉系统重建将弥补传统假肢在力觉反馈方面的缺失,向着智能化假肢迈进一步。其研究特色在于:搭建刚性/本质柔性界面、多维力(垂直压力、剪切、扭转等)解耦的传感技术平台。
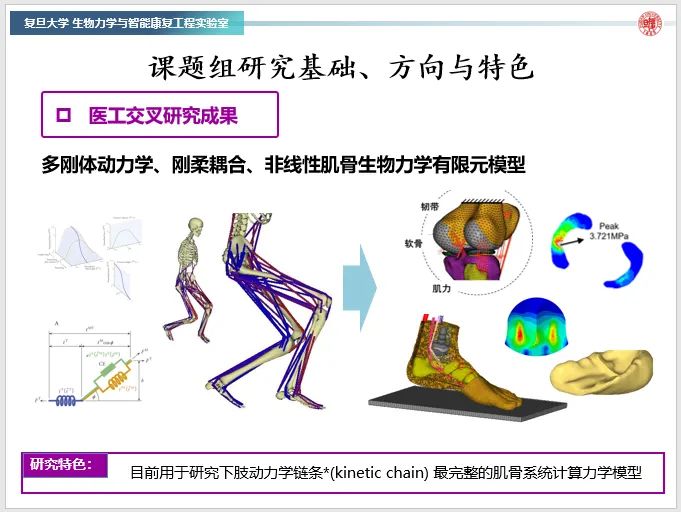
多刚体动力学、刚柔耦合、非线性肌骨生物力学有限元模型(Finite element model, FEM):有限元建模的四个必要条件,包括几何模型,材料参数,边界条件,网格。而肌骨生物力学模型的建立,分析,需要研究者提取需要研究的肌骨模型并在设置其材料属性,边界条件后,画出合理网格,之后进行有限元分析,就某些条件下的肌骨生物力学表现完成模拟与评估。本研究的特色在于:目前可用于研究下肢动力学链条(kinetic chain)最完整的肌骨系统计算其力学模型。
讲座最后,陈文明与参会同学围绕肌骨生物力学与步态装备的有关问题进行了讨论,包括目前国内外大型公司的步态装备研究最新进展,外骨骼机器人、下肢矫形器的发展趋势等。
本次论坛共有近七十位来自复旦大学及其他国内重点院校的同学和老师参与。
医工学人将继续推出“医工交叉前沿技术论坛”第五期,通过系列讲座传播医工交叉前沿技术,促进医学与工程学在深度和广度上的融合创新。
可点击“医工学人”公众号底部菜单栏“最新讲座”获取第五期讲座信息~

本篇文章来源于微信公众号: 医工学人
